
基于改进天牛须搜索算法的七自由度机械臂避障路径规划的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进天牛须搜索算法的七自由度机械臂避障路径规划的任务书.docx
基于改进天牛须搜索算法的七自由度机械臂避障路径规划的任务书任务书一、研究背景在当今工业生产和生活中,机械臂广泛应用于各种场合,包括车间生产、仓储物流、医疗护理、家居服务等各个领域。自动化生产系统中的机械臂,其运动规划和控制机制的高效性和精度至关重要。在实现机械臂运动路径规划时,需要遵循一定的动力学原理和运动学原理,以达到高效、准确和安全的目的。另外,随着机械臂应用场景的多样性,机械臂运动路径规划中的避障问题也成为了一个重要的研究方向。目前,避障路径规划的研究往往与机器人导航、环境感知和控制等相关领域相结合
六自由度机械臂避障路径规划方法.pdf
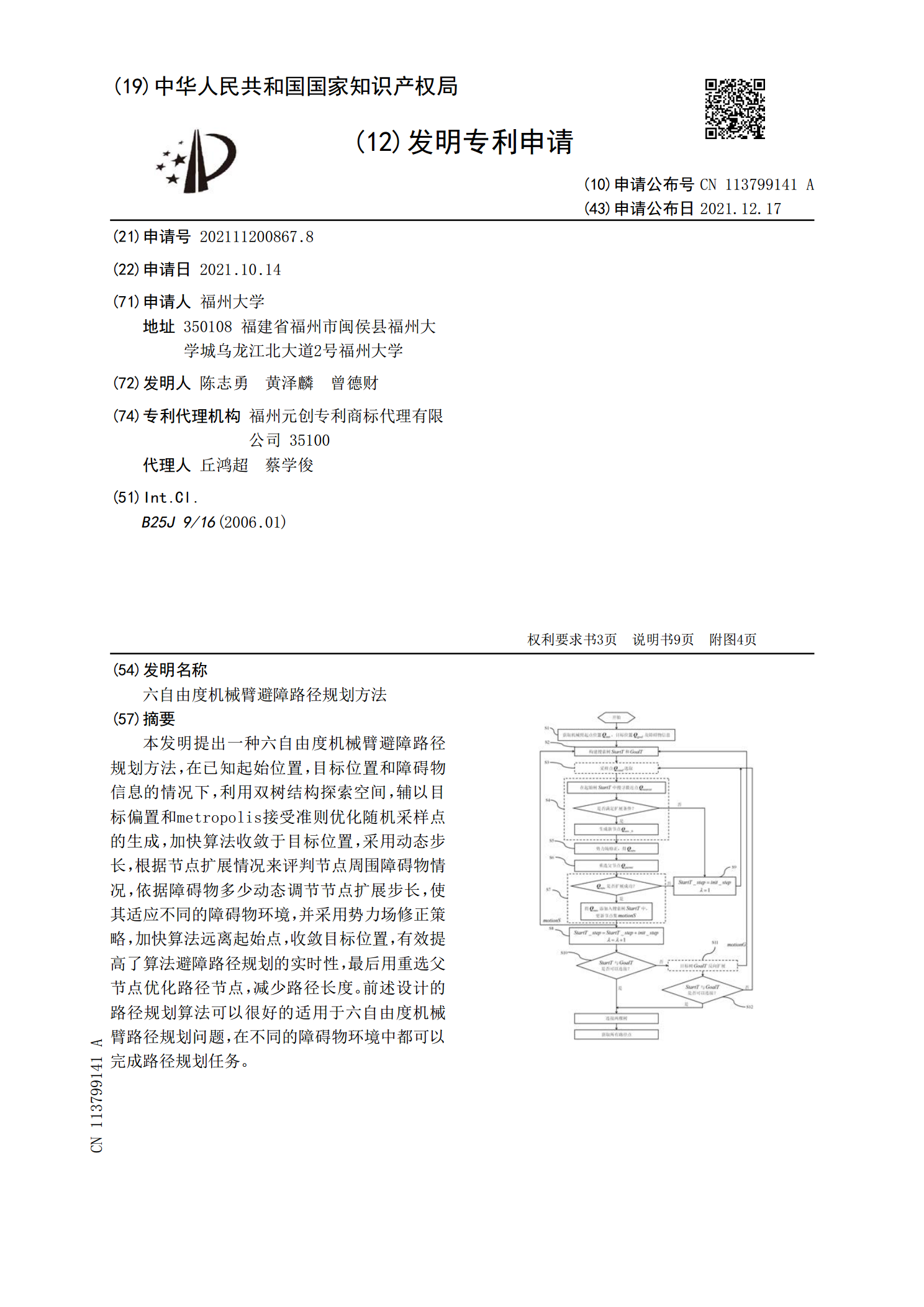
本发明提出一种六自由度机械臂避障路径规划方法,在已知起始位置,目标位置和障碍物信息的情况下,利用双树结构探索空间,辅以目标偏置和metropolis接受准则优化随机采样点的生成,加快算法收敛于目标位置,采用动态步长,根据节点扩展情况来评判节点周围障碍物情况,依据障碍物多少动态调节节点扩展步长,使其适应不同的障碍物环境,并采用势力场修正策略,加快算法远离起始点,收敛目标位置,有效提高了算法避障路径规划的实时性,最后用重选父节点优化路径节点,减少路径长度。前述设计的路径规划算法可以很好的适用于六自由度机械臂路

六自由度机械臂避障路径规划技术研究的任务书.docx
六自由度机械臂避障路径规划技术研究的任务书一、课题背景和研究意义随着科学技术的发展,机械臂被广泛应用于工业制造、医疗、军事等领域。机械臂可以完成很多人力无法完成或者难以完成的任务,极大地提高了效率,减少了人力成本,并且能够降低工作场所的安全风险。机械臂的运动轨迹规划是机械臂控制的重要部分,机械臂的运动轨迹规划能够使机械臂按照预定的轨迹进行移动,从而实现机械臂的高精度、高速度、高效率运动。而在真实的生产环境中,机械臂往往需要在存在障碍物的情况下进行运动,因此机械臂的避障路径规划也成为了机械臂控制的研究热点。

六自由度机械臂避障路径规划研究的开题报告.docx
六自由度机械臂避障路径规划研究的开题报告一、研究背景目前,机械臂已经应用到了许多领域,比如工业生产、医疗卫生、航空航天和军事等。而机械臂在操作过程中,需要遵循特定的轨迹运动,以达到准确、高效和安全地工作目的。然而,在实际应用中,机械臂往往需要在复杂的环境中工作,比如密闭空间、狭小空间或者存在障碍物的环境等,这些环境会对机械臂的运动轨迹产生影响,使得机械臂难以完成任务。因此,需要通过规划路径来避免这些障碍物的干扰,提高机械臂的工作效率和安全性。二、研究内容本研究主要针对六自由度机械臂的避障路径规划进行研究,

六自由度机械臂避障路径规划研究的中期报告.docx
六自由度机械臂避障路径规划研究的中期报告一、项目背景随着机械臂在工业制造、物流配送、医疗服务等领域的广泛应用,机械臂避障技术成为了机械臂路径规划和控制的重要研究方向之一。本课题旨在研究六自由度机械臂的避障路径规划方法,以提高机械臂的运动效率和安全性。二、研究目标本课题的研究目标是设计一种有效的六自由度机械臂避障路径规划算法,解决机械臂在工作过程中可能遇到的障碍物和工作空间限制等问题,确保机械臂的正常工作。三、研究内容及进展本课题的研究内容主要包括以下几个方面:1.六自由度机械臂的运动学建模和逆运动学求解。