
机载面阵成像激光雷达的图像处理研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机载面阵成像激光雷达的图像处理研究.docx
机载面阵成像激光雷达的图像处理研究一、前言随着激光雷达技术的发展,机载面阵成像激光雷达在航空测绘、地理信息、自动驾驶等领域有着广阔的应用前景。机载面阵成像激光雷达通过探测、采集、处理数据,得到与被观测目标相关的空间数据和特征信息,实现对目标的无人自主探测、分类、定量化等多方面的应用。本文旨在综述机载面阵成像激光雷达图像处理方面的研究进展,介绍机载面阵成像激光雷达的基本原理和工作流程,并探讨当前热点领域,为未来的发展提供指导。二、机载面阵成像激光雷达基本原理机载面阵成像激光雷达是一种主动式传感器,其通过聚焦

机载面阵成像激光雷达的图像处理研究.pptx
添加副标题目录PART01PART02激光雷达技术的发展机载面阵成像激光雷达的应用图像处理在激光雷达领域的重要性研究意义PART03系统组成与工作原理激光雷达数据采集数据预处理数据后处理PART04图像滤波算法图像增强算法特征提取算法目标检测与跟踪算法图像分割算法PART05实验数据与实验环境实验结果展示结果分析性能评估PART06研究成果总结未来研究方向感谢您的观看

机载面阵成像激光雷达的图像处理研究的任务书.docx
机载面阵成像激光雷达的图像处理研究的任务书一、研究背景及意义机载面阵成像激光雷达是一种能够获取三维目标点云数据的高精度、远距离测量系统。与传统雷达技术相比,它具有高分辨率、高精度、高重复率等优势,因此在三维建模、无人驾驶、智能交通、测绘地形等领域有广泛应用。然而,这种系统所获取的原始数据量较大,含有大量噪声和无用信息,在图像处理方面有较大的挑战。因此,对机载面阵成像激光雷达图像处理技术进行深入研究,能够提高其数据处理和分析的效率和准确度,增强其在实际应用中的优越性和可靠性。本次研究旨在对机载面阵成像激光雷

基于面阵探测器的凝视成像激光雷达.docx
基于面阵探测器的凝视成像激光雷达随着自动驾驶、机器人、无人机等应用市场的快速发展,激光雷达成为了一个重要的感知器件。其中,凝视成像激光雷达因其对空间分辨率的高要求以及可对杂波进行有效抑制等优势被广泛关注。本文将介绍基于面阵探测器的凝视成像激光雷达的基本原理、设计方法以及应用前景。一、基本原理1.1凝视成像激光雷达的概述凝视成像激光雷达是一种将光束通过橄榄球形透镜或其它形状透镜聚焦到目标上,将反射光通过面阵探测器采集成图像的一种激光雷达。与传统的扫描式激光雷达不同,凝视成像激光雷达可以同时获取多个目标的三维
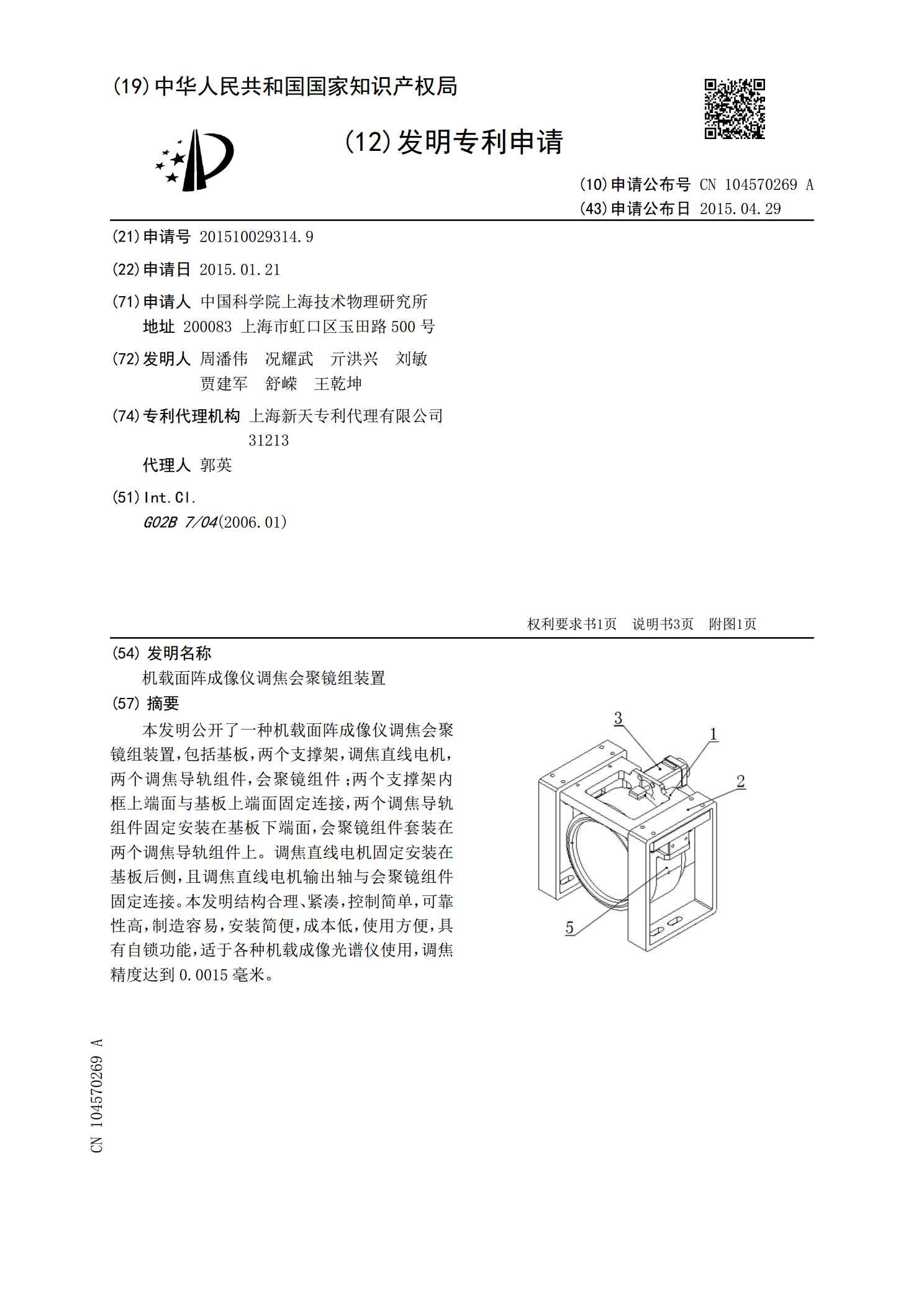
机载面阵成像仪调焦会聚镜组装置.pdf
本发明公开了一种机载面阵成像仪调焦会聚镜组装置,包括基板,两个支撑架,调焦直线电机,两个调焦导轨组件,会聚镜组件;两个支撑架内框上端面与基板上端面固定连接,两个调焦导轨组件固定安装在基板下端面,会聚镜组件套装在两个调焦导轨组件上。调焦直线电机固定安装在基板后侧,且调焦直线电机输出轴与会聚镜组件固定连接。本发明结构合理、紧凑,控制简单,可靠性高,制造容易,安装简便,成本低,使用方便,具有自锁功能,适于各种机载成像光谱仪使用,调焦精度达到0.0015毫米。