
6轴关节型工业机器人平面圆度误差标定技术研究的中期报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

6轴关节型工业机器人平面圆度误差标定技术研究的中期报告.docx
6轴关节型工业机器人平面圆度误差标定技术研究的中期报告摘要:本文针对6轴关节型工业机器人平面圆度误差标定技术进行了研究,介绍了相关理论知识和实验流程,并对实验结果进行了分析。结果表明,本文所提出的标定方法可以降低平面圆度误差,提高机器人控制精度。关键词:6轴关节型工业机器人;平面圆度误差;标定技术;控制精度;实验分析一、引言6轴关节型工业机器人是目前工业生产中常用的自动化设备之一,广泛应用于生产制造、装配、搬运等场合。然而,由于机器人本身的制造精度和长期使用中的磨损等原因,机器人的运动轨迹往往会出现一定程

平面关节型机器人设计、分析与标定技术研究的开题报告.docx
平面关节型机器人设计、分析与标定技术研究的开题报告一、研究背景随着工业自动化的不断发展,机器人系统在生产制造、医疗卫生、科学研究等领域应用越来越广泛。其中,平面关节型机器人是一种具有较高应用价值的机器人,它的关节结构简单、稳定性能好,能够在平面内实现多自由度运动,具有很强的生产自适应性和灵活性。因此,研究平面关节型机器人的设计、分析与标定技术具有重要意义,可以为机器人应用领域的推广提供技术保障。二、研究目的与意义本研究的目的主要在于对平面关节型机器人的设计、分析与标定技术进行研究,以提高机器人的运动精度和

平面关节型机器人设计、分析与标定技术研究.docx
平面关节型机器人设计、分析与标定技术研究标题:平面关节型机器人设计、分析与标定技术研究摘要:随着机器人技术的迅猛发展,平面关节型机器人作为一种常见的机器人结构类型,在工业自动化、医疗卫生、家庭服务等领域得到了广泛的应用。本文将围绕平面关节型机器人的设计、分析与标定技术展开研究,力图在机器人的精确运动控制和姿态重构方面提供新的解决方案。1.引言机器人技术是现代工业生产和服务领域的重要支撑,而平面关节型机器人作为最基本的机器人结构之一,具有结构简单、运动自由度较高、成本相对低等优势,因此备受关注。本节将介绍论

平面关节型机器人设计、分析与标定技术研究的任务书.docx
平面关节型机器人设计、分析与标定技术研究的任务书本项目旨在研究平面关节型机器人的设计、分析与标定技术,为工业自动化领域的发展提供技术支持。该任务书包括了项目的背景、研究目的、研究内容、研究方法、研究计划、预期成果以及需要的研究条件和资源等方面的内容。一、背景机器人技术的发展已成为现代工业自动化的重要组成部分,尤其是在制造业领域,机器人拥有广泛的应用前景。平面关节型机器人作为传统机器人的一种,具有结构简单、线性运动轨迹和较高的精度等特点,因此在装配、喷涂、搬运等领域得到了广泛应用。为了更好地满足生产线的生产
一种基于球杆仪的六轴关节工业机器人空间误差标定方法.pdf
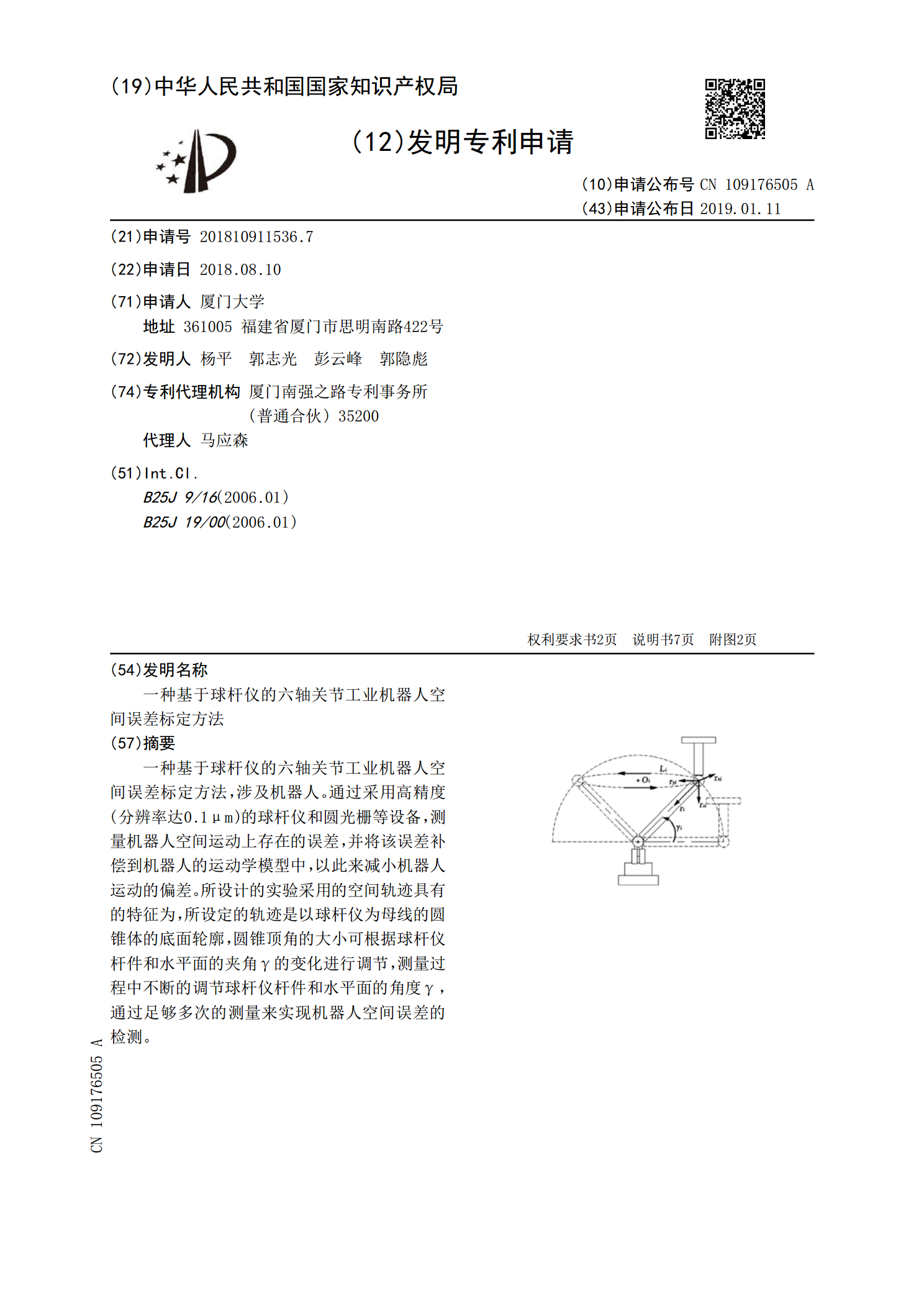
一种基于球杆仪的六轴关节工业机器人空间误差标定方法,涉及机器人。通过采用高精度(分辨率达0.1μm)的球杆仪和圆光栅等设备,测量机器人空间运动上存在的误差,并将该误差补偿到机器人的运动学模型中,以此来减小机器人运动的偏差。所设计的实验采用的空间轨迹具有的特征为,所设定的轨迹是以球杆仪为母线的圆锥体的底面轮廓,圆锥顶角的大小可根据球杆仪杆件和水平面的夹角γ的变化进行调节,测量过程中不断的调节球杆仪杆件和水平面的角度γ,通过足够多次的测量来实现机器人空间误差的检测。