
110kV输电线路自动巡检机器人系统的研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

110kV输电线路自动巡检机器人系统的研究的任务书.docx
110kV输电线路自动巡检机器人系统的研究的任务书任务书一、任务背景随着电力行业的迅速发展,各个电力公司的输电线路增长迅速,而线路的安全、稳定运行成为电力公司亟待解决的问题。同时,人工巡检的方式存在人力成本高,效率低,误差大等问题。因此,研发一种自动巡检机器人系统,能够快速、准确、有效地巡检线路,提升电力行业的安全和运行效率,具有十分重要的现实意义。二、任务目标1.研究110kV输电线路自动巡检机器人系统的设计。2.研究巡检机器人系统的构成,包含机器人传动系统、导航定位系统、图像识别系统和数据处理分析系统

110kV输电线路自动巡检机器人系统的研究.docx
110kV输电线路自动巡检机器人系统的研究110kV输电线路自动巡检机器人系统的研究摘要:随着电力系统的建设和发展,输电线路的自动巡检变得越来越重要。为了提高巡检效率和准确性,本文研究了110kV输电线路的自动巡检机器人系统。该系统利用机器人技术和传感器技术,实现了对输电线路的快速巡检和故障检测。本文主要研究了机器人的设计和控制,以及传感器的选择和使用。经过实验结果表明,该系统可以有效地提高输电线路的巡检效率和准确性。关键词:110kV输电线路,自动巡检,机器人系统,传感器技术一、引言随着电力系统的规模不

110kV输电线路自动巡检机器人系统的研究的中期报告.docx
110kV输电线路自动巡检机器人系统的研究的中期报告一、需求分析110kV输电线路的安全性和可靠性直接关系到电网的稳定运行和供电质量保障。自动巡检机器人系统的引入可以提高巡检效率,降低劳动成本,确保巡检的全面性和准确性。在实际应用中,机器人应具备以下要求:1.具有自主导航能力,能够自主规划巡检路径。2.具有足够的安全保障能力,能够避免机器人与输电线路发生接触。3.具有强大的数据处理和分析能力,能够将采集到的数据进行准确地分析并形成巡检报告。4.具有较强的适应性,能够适应不同环境的巡检。二、方案设计本系统由

输电线路巡检机器人系统及控制软件研究的任务书.docx
输电线路巡检机器人系统及控制软件研究的任务书一、任务背景输电线路巡检是保障电力系统安全稳定运行的重要工作,而传统人工巡检方法存在效率低下、风险大、成本高等问题。因此,研究开发一套能够自主巡检输电线路的机器人系统及控制软件,具有重要的现实意义和应用价值。二、任务目标本项目旨在设计并实现一套完整的输电线路巡检机器人系统及控制软件,包括机器人硬件设计、巡检策略制定、运动控制及路径规划、传感器采集与数据处理等方面。具体目标为:1.设计并制造一款能够适应各类输电线路巡检需求的机器人,满足不同情况下的巡检需求。2.研
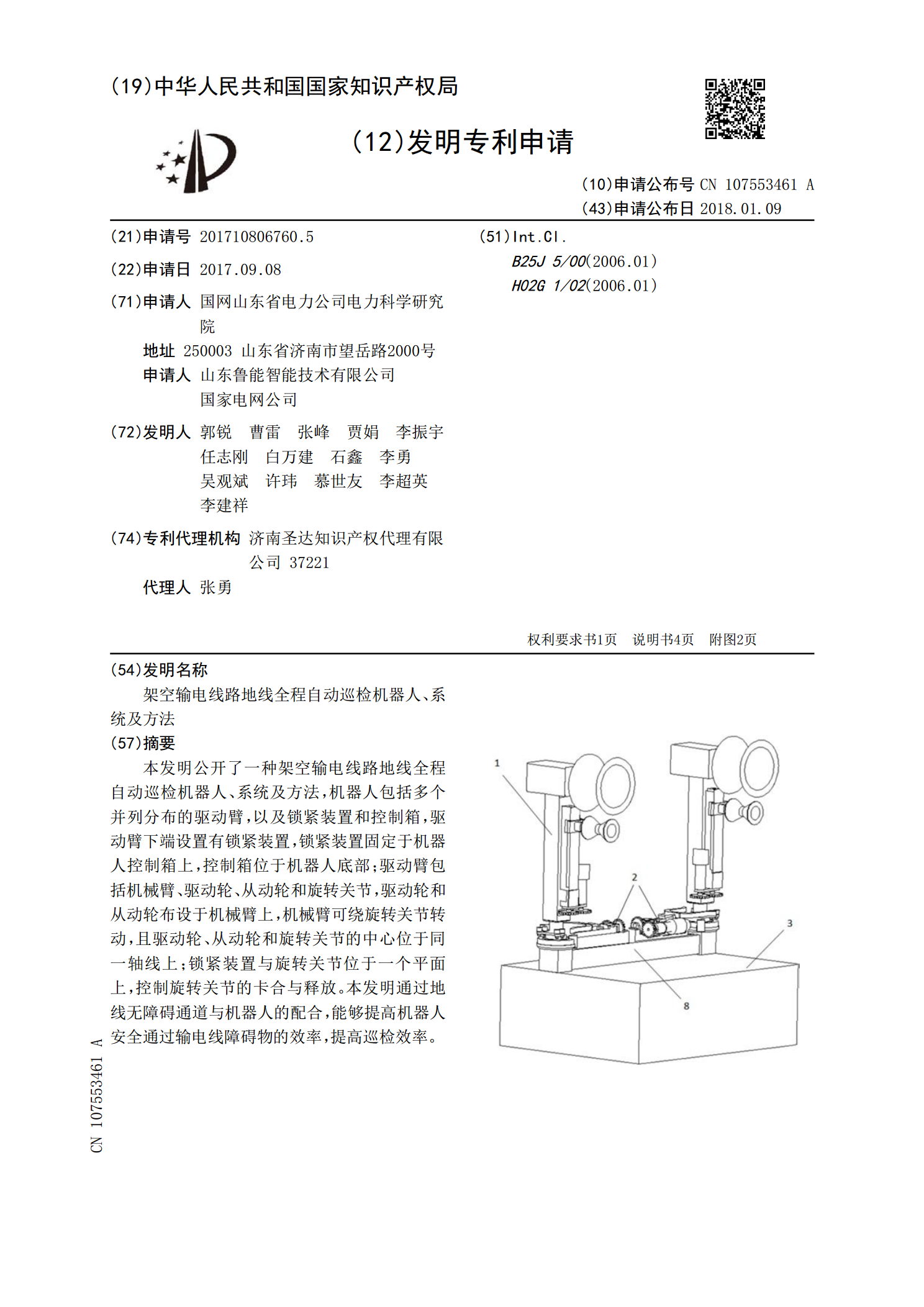
架空输电线路地线全程自动巡检机器人、系统及方法.pdf
本发明公开了一种架空输电线路地线全程自动巡检机器人、系统及方法,机器人包括多个并列分布的驱动臂,以及锁紧装置和控制箱,驱动臂下端设置有锁紧装置,锁紧装置固定于机器人控制箱上,控制箱位于机器人底部;驱动臂包括机械臂、驱动轮、从动轮和旋转关节,驱动轮和从动轮布设于机械臂上,机械臂可绕旋转关节转动,且驱动轮、从动轮和旋转关节的中心位于同一轴线上;锁紧装置与旋转关节位于一个平面上,控制旋转关节的卡合与释放。本发明通过地线无障碍通道与机器人的配合,能够提高机器人安全通过输电线障碍物的效率,提高巡检效率。