
基于非线性状态观测器的过热汽温控制系统的分析与设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于非线性状态观测器的过热汽温控制系统的分析与设计.docx
基于非线性状态观测器的过热汽温控制系统的分析与设计随着现代工业的发展,汽温控制系统已经成为了很多工业项目的重要组成部分,而过热汽温控制系统更是其中的一个重要细分领域。基于非线性状态观测器的控制方法为该系统提供了一种有效的控制策略,本文将对这一方法进行分析与设计。一、过热汽温控制系统的基本原理过热汽温控制系统是指对于锅炉中的水蒸气过热器,在保证较高出口汽温的同时,保持压力、温度、流量等参数的稳定控制。该系统通常由汽温控制器、过热器及相关仪表仪器组成。传统的过热汽温控制方法大多采用PID控制器,但这种方法存在
基于非线性智能预测控制技术的超临界机组再热汽温优化控制系统.pdf
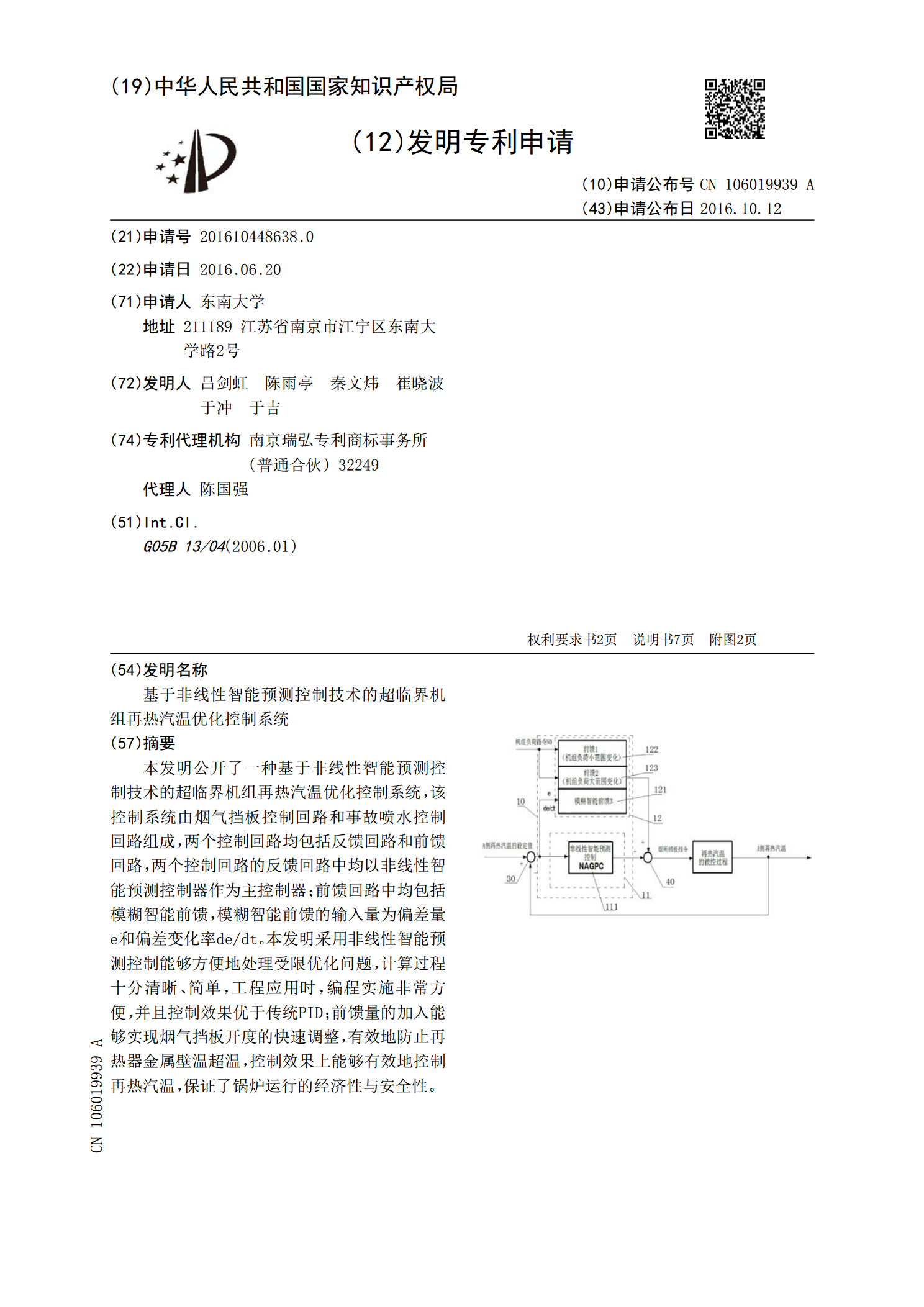
本发明公开了一种基于非线性智能预测控制技术的超临界机组再热汽温优化控制系统,该控制系统由烟气挡板控制回路和事故喷水控制回路组成,两个控制回路均包括反馈回路和前馈回路,两个控制回路的反馈回路中均以非线性智能预测控制器作为主控制器;前馈回路中均包括模糊智能前馈,模糊智能前馈的输入量为偏差量e和偏差变化率de/dt。本发明采用非线性智能预测控制能够方便地处理受限优化问题,计算过程十分清晰、简单,工程应用时,编程实施非常方便,并且控制效果优于传统PID;前馈量的加入能够实现烟气挡板开度的快速调整,有效地防止再热器

基于线性量化的网络控制系统状态观测器设计.docx
基于线性量化的网络控制系统状态观测器设计基于线性量化的网络控制系统状态观测器设计摘要:随着物联网技术的快速发展,网络控制系统在实时性、可靠性和安全性方面面临着新的挑战。而状态观测器作为网络控制系统的核心组成部分,负责实时监测系统的状态信息,对系统的稳定性和性能至关重要。本论文针对网络控制系统中状态观测器的设计提出了一种基于线性量化的方法,将连续状态观测问题转化为离散的观测问题,通过优化量化器设计参数来提高系统的稳定性和性能。实验结果表明,基于线性量化的状态观测器设计能够有效地提高系统的精确度和稳定性。关键

非线性系统基于降维状态观测器的反馈稳定化设计.docx
非线性系统基于降维状态观测器的反馈稳定化设计非线性系统基于降维状态观测器的反馈稳定化设计摘要:随着控制理论和技术的不断发展,越来越多的非线性系统得到了广泛应用。而非线性系统的反馈稳定化设计是控制系统中的重要问题之一。本文提出了基于降维状态观测器的反馈稳定化设计方法,该方法可以有效地稳定非线性系统,并实现系统的性能优化。通过降维状态观测器,可以实现对非线性系统状态的准确观测,从而使得系统的反馈控制更加精确和稳定。经过数值仿真实验,证明了该方法的有效性和优越性。关键词:非线性系统;反馈稳定化;降维状态观测器;

基于PSO算法的过热汽温非线性预测控制方法研究.pptx
汇报人:CONTENTS添加章节标题研究背景和意义工业过热汽温控制的重要性过热汽温控制的研究现状和存在的问题研究目的和意义PSO算法原理及在控制领域的应用PSO算法的基本原理和流程PSO算法在控制领域的应用现状优势:a.简单易实现:PSO算法原理简单,易于理解和实现。b.收敛速度快:PSO算法具有较快的收敛速度,能够快速找到最优解。c.鲁棒性强:PSO算法对参数和初始值的选择不敏感,具有较强的鲁棒性。a.简单易实现:PSO算法原理简单,易于理解和实现。b.收敛速度快:PSO算法具有较快的收敛速度,能够快速