
基于模糊控制的小波神经网络盲均衡算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于模糊控制的小波神经网络盲均衡算法.docx
基于模糊控制的小波神经网络盲均衡算法基于模糊控制的小波神经网络盲均衡算法摘要:本文提出了一种基于模糊控制的小波神经网络盲均衡算法。盲均衡是一种用于解决通信系统中非线性失真和码间干扰等问题的技术。本文通过引入小波神经网络和模糊控制,实现了更高效、更准确的盲均衡。实验结果表明,该算法能够有效地改善通信系统的性能,提高信号的传输质量。关键词:盲均衡,小波神经网络,模糊控制,非线性失真,码间干扰1.引言盲均衡是一种重要的信号处理技术,用于解决通信系统中非线性失真和码间干扰等问题。在传统的均衡算法中,通常需要先知道

模糊神经网络控制的混合小波神经网络盲均衡方法.pdf
本发明公布了一种模糊神经网络控制的混合小波神经网络盲均衡方法,本发明方法包括如下步骤:a.将发射信号x(n)经过脉冲响应信道得到信道输出向量b(n);b.采用信道噪声N(n)和步骤a所述的信道输出向量b(n)得到盲均衡器的输入序列;c.将步骤b所述的盲均衡器的输入序列y(n)依次经过改进的混合小波神经网络得到输出信号利用模糊神经网络(FNN)来调整改进的混合小波神经网络中神经元小波函数中平移因子和尺度因子的迭代步长,并以均方误差E(n)=MSE(n)与均方误差的偏差ΔE(n)=MSE(n)-MSE(n-1

模糊控制的动态小波神经网络反馈盲均衡方法.pdf
本发明公布了一种模糊控制的动态小波神经网络反馈盲均衡方法,包括如下步骤:a.)将发送信号序列x(n)经过未知信道h(n)后与高斯白噪声N(n)相叠加得到观测序列y(n);b.)b.)将误差信号e(n)经过常数模算法CMA得到动态小波神经网络中横向滤波器构成的线性部分的抽头系数c(n);c.)将模糊神经网络控制器输入量偏差E(n)和偏差变化ΔE(n)经过模糊神经网络控制器得到动态小波神经网络中小波神经网络构成的非线性部分中小波函数的伸缩因子和平移因子的迭代步长变化值Δμ;d.)将所述观测序列y(n)依次经过

多小波模糊神经网络盲均衡算法.docx
多小波模糊神经网络盲均衡算法标题:多小波模糊神经网络在盲均衡算法中的应用摘要:随着通信技术的不断发展,无线通信在现代社会中占据了重要的地位。然而,传输信道中的噪声和多径干扰等问题会导致信号质量的下降,从而影响通信系统的性能。因此,盲均衡算法作为一种最小化信号失真的技术被广泛应用于无线通信中。本文提出了一种基于多小波模糊神经网络(MDW-FNN)的盲均衡算法,通过对信号进行小波变换和模糊神经网络的优化,实现了对多路径干扰的自适应均衡和降噪。1.引言近年来,随着无线通信技术的飞速发展,聚焦于传输质量增强的研究
基于平衡正交多小波变换的模糊神经网络盲均衡方法.pdf
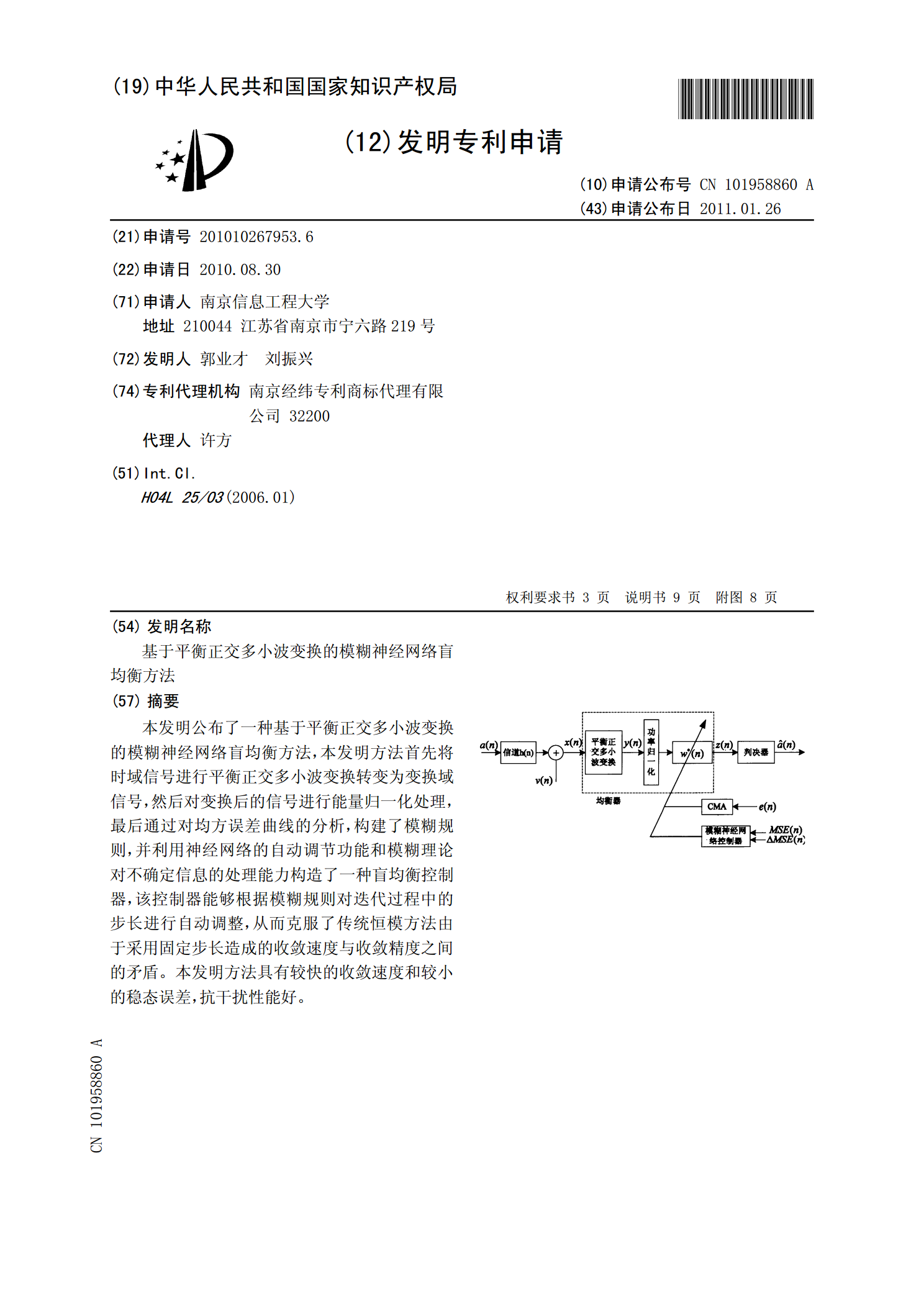
本发明公布了一种基于平衡正交多小波变换的模糊神经网络盲均衡方法,本发明方法首先将时域信号进行平衡正交多小波变换转变为变换域信号,然后对变换后的信号进行能量归一化处理,最后通过对均方误差曲线的分析,构建了模糊规则,并利用神经网络的自动调节功能和模糊理论对不确定信息的处理能力构造了一种盲均衡控制器,该控制器能够根据模糊规则对迭代过程中的步长进行自动调整,从而克服了传统恒模方法由于采用固定步长造成的收敛速度与收敛精度之间的矛盾。本发明方法具有较快的收敛速度和较小的稳态误差,抗干扰性能好。