
基于Kinect的三维重建方法的研究与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kinect的三维重建方法的研究与实现.docx
基于Kinect的三维重建方法的研究与实现摘要:随着虚拟现实技术的发展,三维重建成为了相当热门的研究方向。本文基于Kinect,研究了一种实现三维重建的方法。首先介绍了Kinect原理及其在三维重建中的应用,然后详细描述了本方法的流程,包括获取深度数据、对点云进行配准、进行三维建模、最后输出三维模型。采用本方法可以实现较为精确的三维重建。本文还对该方法进行了实验验证和分析,结果表明本方法具有较高的重建准确度和鲁棒性。本文的研究成果有助于推动三维重建技术的发展,具有一定的实际应用价值。关键词:Kinect;

基于Kinect v2三维重建的研究与实现.docx
基于Kinectv2三维重建的研究与实现基于Kinectv2三维重建的研究与实现摘要:三维重建是计算机视觉和计算机图形学领域的重要研究方向之一。Kinectv2是一种广泛应用于虚拟现实、人机交互和游戏开发等领域的深度摄像头。本论文以Kinectv2为基础,研究了如何利用它进行三维场景的重建。具体而言,我们采用了一种基于RGB-D图像的方法,通过将颜色和深度信息结合起来,实现了快速而准确的三维重建。实验结果表明,我们的方法能够在保持精度的同时,提高重建速度,具有较好的应用潜力。关键词:Kinectv2,三维

基于Kinect的实时三维重建及滤波方法的研究与设计综述报告.docx
基于Kinect的实时三维重建及滤波方法的研究与设计综述报告在计算机视觉领域,基于Kinect进行实时三维重建已经成为一个热门的研究课题。Kinect是微软在2010年推出的一款基于深度摄像机和RGB相机的设备,能够实时获取场景的深度和彩色信息。由于其性能优越且价格相对便宜,Kinect成为了众多三维重建研究的主要设备之一。实时三维重建的方法主要包括场景特征提取、深度图像处理和点云滤波等过程。首先,在特征提取阶段,需要从深度图像中提取出代表场景结构的特征点。常用的特征点提取算法有SIFT、SURF和ORB
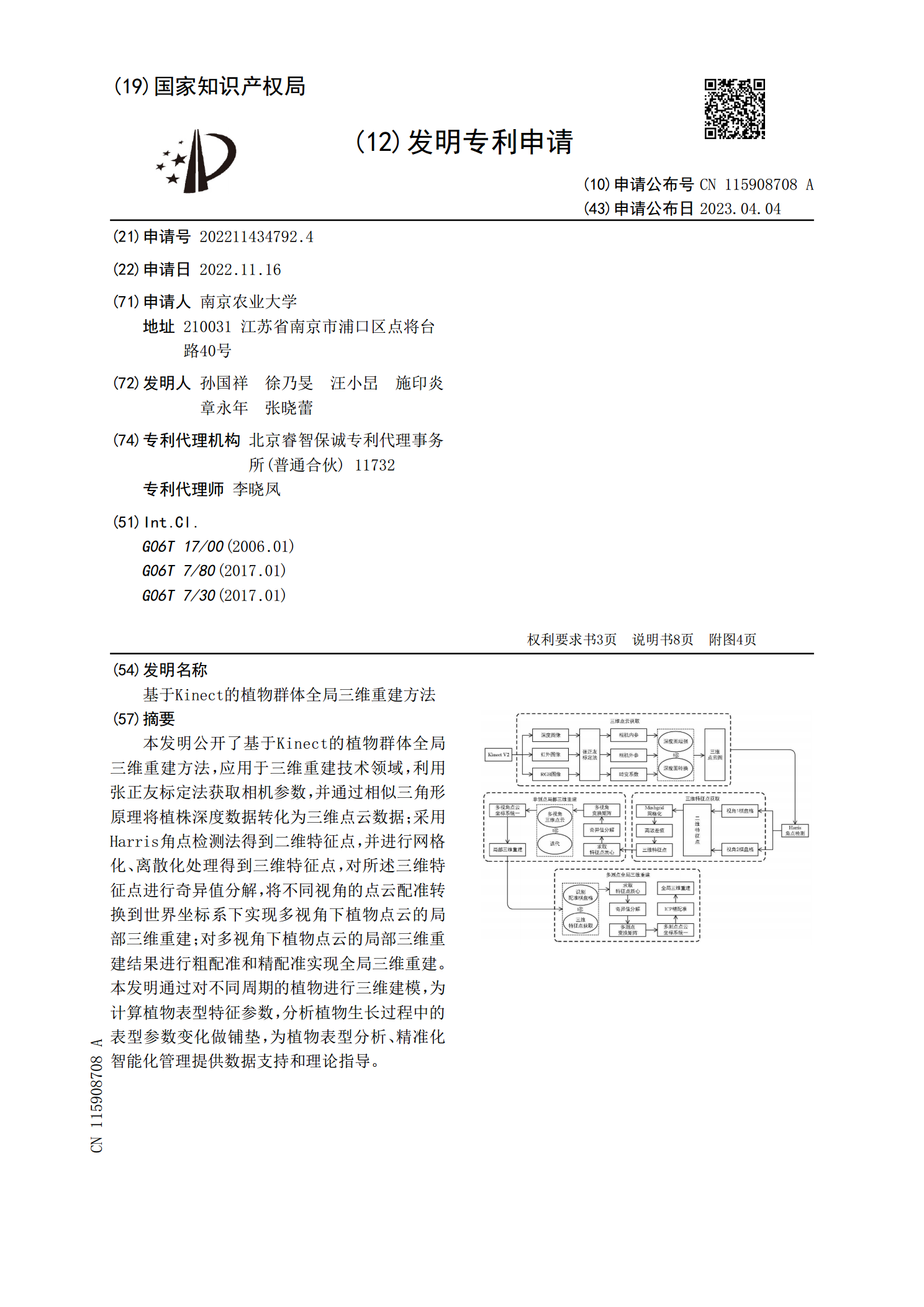
基于Kinect的植物群体全局三维重建方法.pdf
本发明公开了基于Kinect的植物群体全局三维重建方法,应用于三维重建技术领域,利用张正友标定法获取相机参数,并通过相似三角形原理将植株深度数据转化为三维点云数据;采用Harris角点检测法得到二维特征点,并进行网格化、离散化处理得到三维特征点,对所述三维特征点进行奇异值分解,将不同视角的点云配准转换到世界坐标系下实现多视角下植物点云的局部三维重建;对多视角下植物点云的局部三维重建结果进行粗配准和精配准实现全局三维重建。本发明通过对不同周期的植物进行三维建模,为计算植物表型特征参数,分析植物生长过程中的表
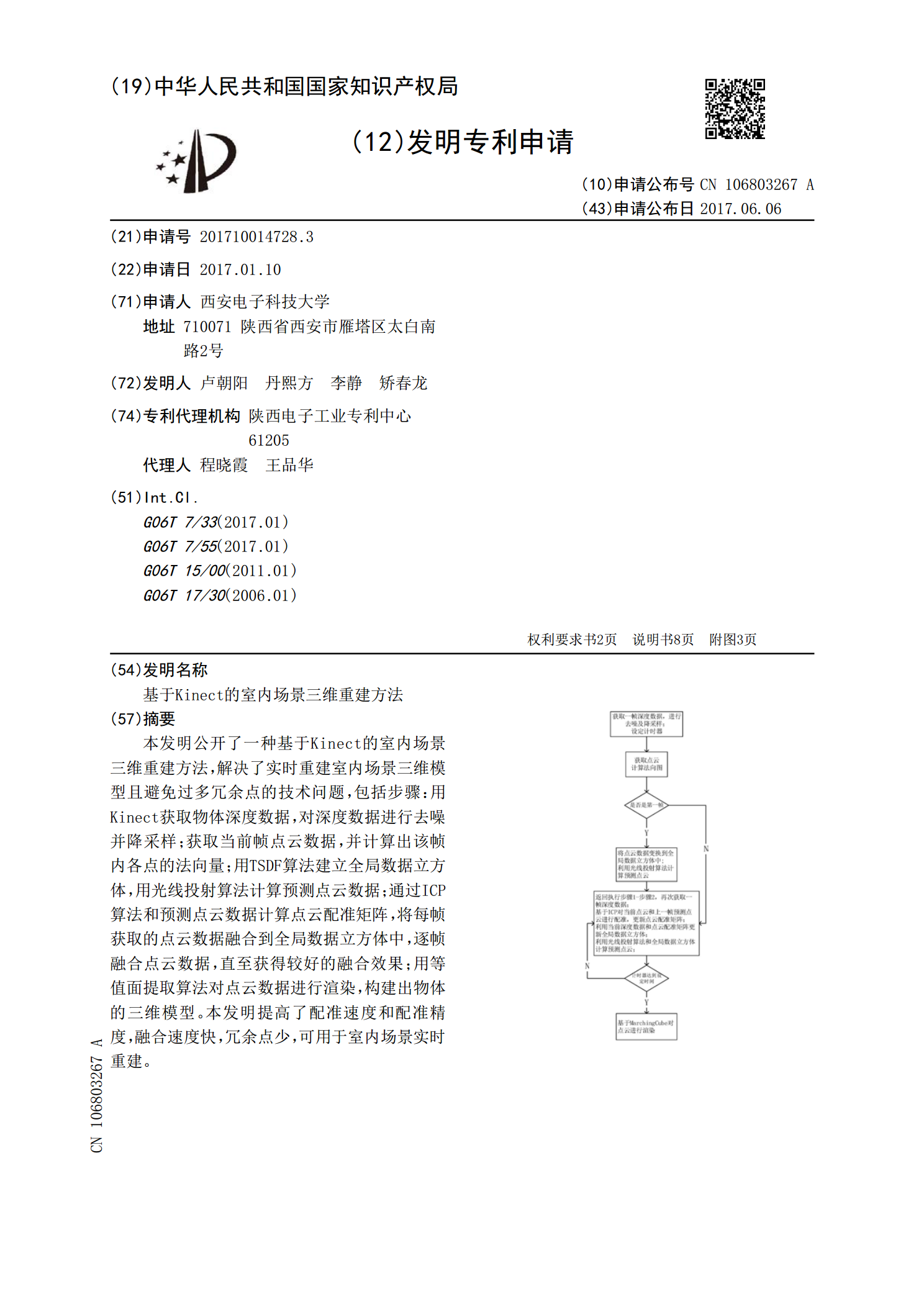
基于Kinect的室内场景三维重建方法.pdf
本发明公开了一种基于Kinect的室内场景三维重建方法,解决了实时重建室内场景三维模型且避免过多冗余点的技术问题,包括步骤:用Kinect获取物体深度数据,对深度数据进行去噪并降采样;获取当前帧点云数据,并计算出该帧内各点的法向量;用TSDF算法建立全局数据立方体,用光线投射算法计算预测点云数据;通过ICP算法和预测点云数据计算点云配准矩阵,将每帧获取的点云数据融合到全局数据立方体中,逐帧融合点云数据,直至获得较好的融合效果;用等值面提取算法对点云数据进行渲染,构建出物体的三维模型。本发明提高了配准速度和