
基于Kinect深度相机的室内三维场景重构.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kinect深度相机的室内三维场景重构.docx
基于Kinect深度相机的室内三维场景重构摘要:本文基于Kinect深度相机对室内场景进行三维重构,通过对Kinect深度相机原理和算法进行分析,设计了一套三维重构方案。本文首先讨论了Kinect深度相机的工作原理和应用,然后介绍了三维场景重构的主要算法和步骤,最后通过实验验证了该方案在室内场景重构中的有效性。实验结果表明,该方案能够对室内场景进行准确、高效的三维重构,并在不同应用领域具有广泛的应用前景。关键词:Kinect深度相机,三维场景重构,算法,实验正文:一、引言随着计算机计算能力的不断提高和计算

基于Kinect深度相机的室内三维场景重构的开题报告.docx
基于Kinect深度相机的室内三维场景重构的开题报告一、选题背景随着计算机视觉和深度学习技术的发展,室内三维重构变得越来越普遍和重要。它不仅可以被用于游戏和虚拟现实应用,还可以在建筑设计和安保领域中得到应用。Kinect深度相机是一种廉价且易于使用的硬件设备,可以用于室内三维场景重构。本研究旨在探讨如何利用Kinect深度相机实现室内三维场景重构。二、研究目的1.研究Kinect深度相机原理和技术;2.理解三维重构的基本概念和算法;3.实现基于Kinect深度相机的室内三维场景重构;4.对实验结果进行测试

基于Kinect深度相机的室内三维场景重构的中期报告.docx
基于Kinect深度相机的室内三维场景重构的中期报告1.研究背景随着计算机视觉技术和深度学习算法的发展,室内三维场景重构成为一个热门研究领域。室内三维场景重构在室内布局设计、智能家居和虚拟现实等领域具有广泛应用。2.研究目的本研究旨在基于Kinect深度相机的室内三维场景重构技术,实现对室内场景的高精度快速重构,为室内布局设计、智能家居和虚拟现实等应用提供支持。3.研究内容本研究的具体内容包括以下几个方面:(1)学习Kinect深度相机拍摄室内场景的原理和操作方法;(2)对Kinect深度相机拍摄得到的数

基于Kinect深度相机的实时三维人体动画.docx
基于Kinect深度相机的实时三维人体动画基于Kinect深度相机的实时三维人体动画摘要:随着计算机图形学和计算机视觉的发展,实时三维人体动画在虚拟现实、视频游戏和电影制作等领域展示了广泛的应用前景。本论文主要关注使用Kinect深度相机来实现实时三维人体动画的技术。首先介绍了Kinect深度相机的原理和技术特点,然后概述了实时三维人体动画的基本原理和挑战。接下来详细讨论了基于Kinect深度相机的实时三维人体动画的方法和流程,包括人体姿势识别、骨骼跟踪和动画合成等关键技术。最后通过实验验证了基于Kine
基于Kinect的室内场景三维重建方法.pdf
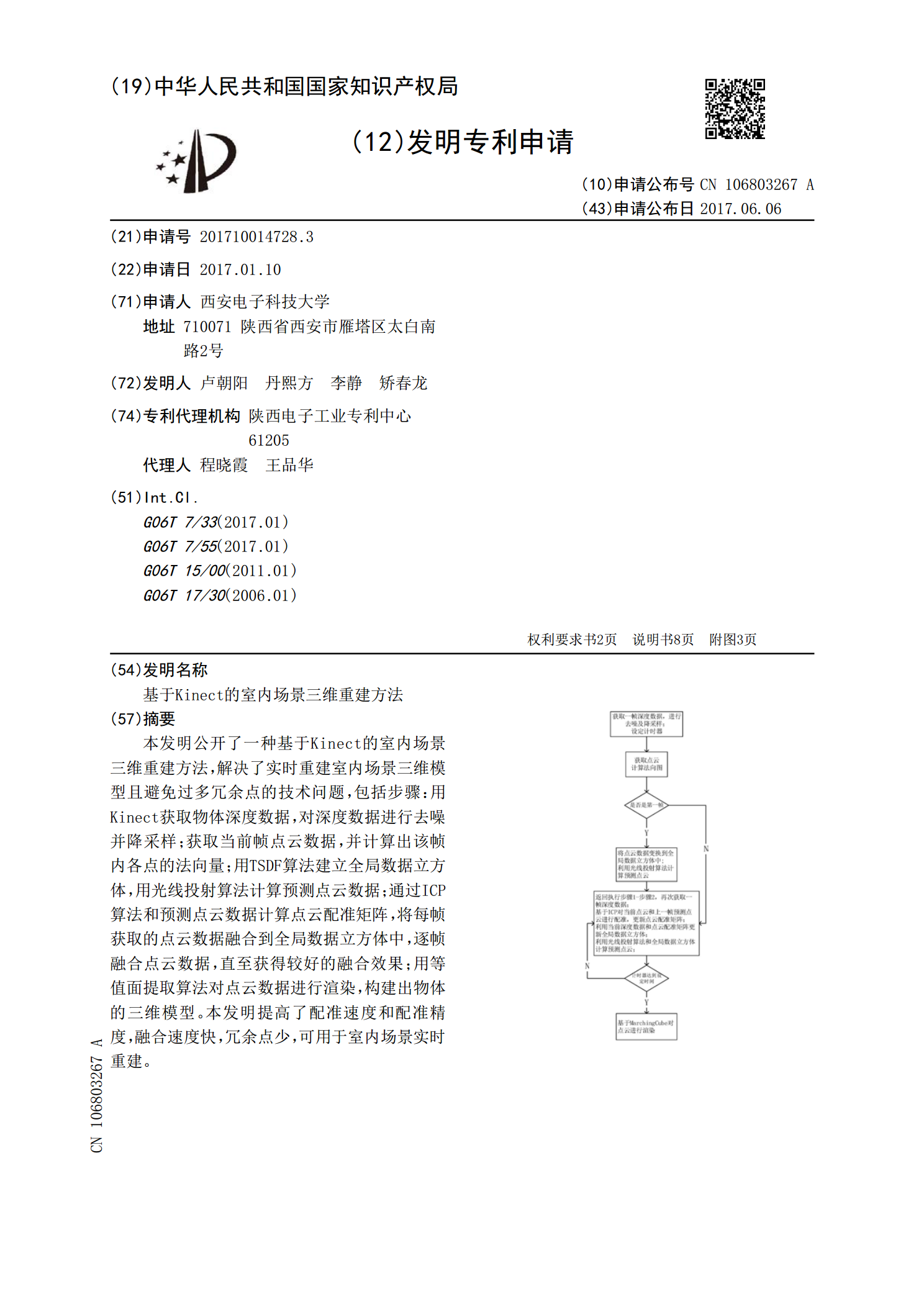
本发明公开了一种基于Kinect的室内场景三维重建方法,解决了实时重建室内场景三维模型且避免过多冗余点的技术问题,包括步骤:用Kinect获取物体深度数据,对深度数据进行去噪并降采样;获取当前帧点云数据,并计算出该帧内各点的法向量;用TSDF算法建立全局数据立方体,用光线投射算法计算预测点云数据;通过ICP算法和预测点云数据计算点云配准矩阵,将每帧获取的点云数据融合到全局数据立方体中,逐帧融合点云数据,直至获得较好的融合效果;用等值面提取算法对点云数据进行渲染,构建出物体的三维模型。本发明提高了配准速度和