
无人驾驶汽车动态障碍物避撞关键技术研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人驾驶汽车动态障碍物避撞关键技术研究的开题报告.docx
无人驾驶汽车动态障碍物避撞关键技术研究的开题报告一、课题背景随着无人驾驶技术的快速发展,我们的出行方式也将发生翻天覆地的变化。无人驾驶汽车的出现不仅可以给人们带来更加便利和舒适的出行体验,还能大大提高汽车的安全性能,减少交通事故的发生。然而,实现无人驾驶汽车的普及化还存在许多技术难题需要解决,其中,动态障碍物的避撞是其中的重要问题之一。动态障碍物包括其他车辆、行人、骑行者等,它们都是行车过程中的潜在风险,需要无人驾驶汽车及时识别和避让。因此,在无人驾驶汽车的自主行驶功能实现过程中,如何实现动态障碍物的避撞

无人驾驶汽车动态障碍物避撞关键技术研究.docx
无人驾驶汽车动态障碍物避撞关键技术研究摘要无人驾驶汽车是未来汽车行业的发展趋势,而动态障碍物避撞技术是保证无人驾驶汽车安全性的关键。本论文综述了动态障碍物避撞的相关技术研究现状,包括传感器技术、障碍物识别与跟踪、路径规划与决策等方面的关键技术,并对未来的研究方向进行了展望。1.引言随着科技的不断进步,无人驾驶汽车成为了汽车行业的未来发展方向。而无人驾驶汽车要实现真正的商用化,除了需要充足的硬件设备外,更需要具备完善的避碰技术,以保证行车安全。动态障碍物避撞技术就是其中的关键之一。2.传感器技术传感器技术是
一种无人驾驶汽车避撞策略.pdf
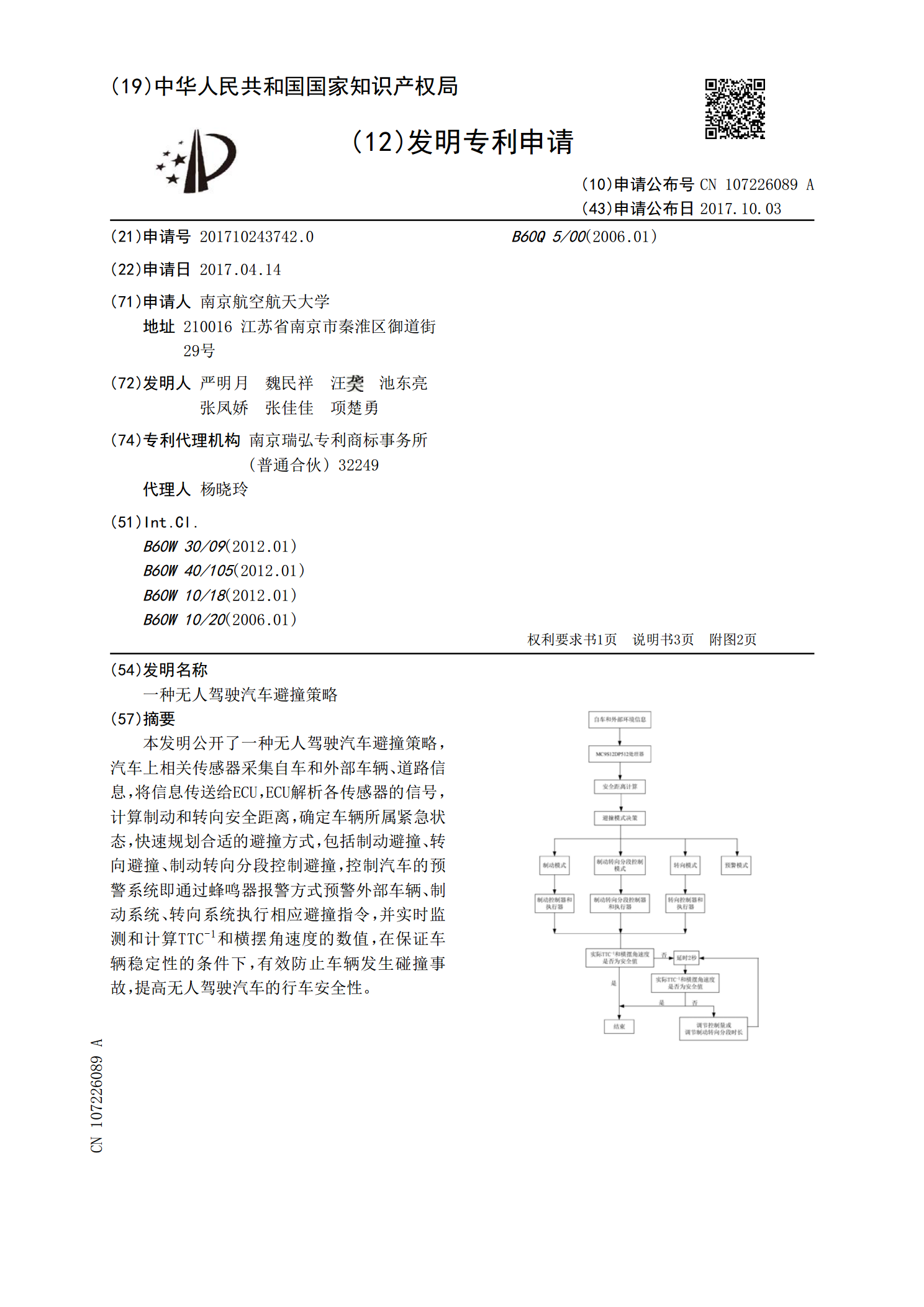
本发明公开了一种无人驾驶汽车避撞策略,汽车上相关传感器采集自车和外部车辆、道路信息,将信息传送给ECU,ECU解析各传感器的信号,计算制动和转向安全距离,确定车辆所属紧急状态,快速规划合适的避撞方式,包括制动避撞、转向避撞、制动转向分段控制避撞,控制汽车的预警系统即通过蜂鸣器报警方式预警外部车辆、制动系统、转向系统执行相应避撞指令,并实时监测和计算TTC

无人驾驶车辆运动障碍物检测、预测和避撞方法研究的中期报告.docx
无人驾驶车辆运动障碍物检测、预测和避撞方法研究的中期报告本报告旨在介绍目前无人驾驶车辆在运动过程中遇到的障碍物检测、预测和避撞方法的研究进展情况,主要包括以下内容:一、无人驾驶车辆的感知系统无人驾驶车辆的感知系统是实现障碍物检测、预测和避撞的重要组成部分,目前无人驾驶车辆的感知系统主要包括雷达、摄像头、激光雷达、GPS、惯性导航系统等多种传感器,这些传感器可以协同作用,提供丰富的环境信息,帮助车辆决策并做出避撞动作。二、障碍物检测方法障碍物检测方法是无人驾驶车辆实现自主避撞的基础,主要涉及到障碍物的检测、

无人驾驶车辆运动障碍物检测、预测和避撞方法研究.docx
无人驾驶车辆运动障碍物检测、预测和避撞方法研究随着科技的不断发展,无人驾驶车辆已经成为当今世界各个行业的关注焦点。尤其是在汽车行业,无人驾驶汽车已经逐渐成为新的热门话题。然而,无人驾驶车辆要在复杂、多变的道路环境中实现安全、高效行驶,需要具备处理复杂问题的算法和技术。其中,运动障碍物检测、预测和避撞技术是非常重要的研究内容。一、无人驾驶车辆运动障碍物检测技术无人驾驶车辆的运动障碍物检测技术主要是针对重要的静态和动态物体进行定位和识别。这项技术可以采用传感器、相机、雷达和激光等多种技术来实现。其中,雷达技术