
基于四旋翼平台的融合单目视觉与惯性传感的里程计方法研究的任务书.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于四旋翼平台的融合单目视觉与惯性传感的里程计方法研究的任务书.docx
基于四旋翼平台的融合单目视觉与惯性传感的里程计方法研究的任务书任务书一、任务背景四旋翼无人机作为一种重要的载荷平台,广泛应用于无人机拍照、空中巡航、农业、林业、地质勘测、物流等领域。在这些应用场景中,要求无人机能够自主实现精确的定位和导航,并保持良好的稳定性和控制性能。因此,无人机的里程计方法与导航能力是无人机性能与使用效果的重要关键因素。目前,惯性测量单元(IMU)是获得高精度时时姿态转角信息的主要手段,而单目视觉是获取三维场景信息和实现位姿估计的较为经济和有效的方法。因此,融合单目视觉与惯性传感的里程

基于单目直接法的水下视觉惯性里程计方法研究.docx
基于单目直接法的水下视觉惯性里程计方法研究基于单目直接法的水下视觉惯性里程计方法研究摘要:水下视觉惯性里程计是一项关键技术,广泛应用于水下机器人、潜水器、水下救援等领域。本文针对水下环境的特殊性,提出了一种基于单目直接法的水下视觉惯性里程计方法。通过分析水下光照变化和水下图像的失真问题,结合惯性测量单元(IMU)提供的姿态信息,实现了水下视觉里程计的鲁棒性和精确性。实验结果表明,本方法在水下环境下具有良好的定位精度和鲁棒性。关键词:水下视觉、惯性里程计、单目直接法、光照变化、失真、鲁棒性、精确性1.引言水
基于视觉惯性融合的四旋翼飞行器定位方法.pdf
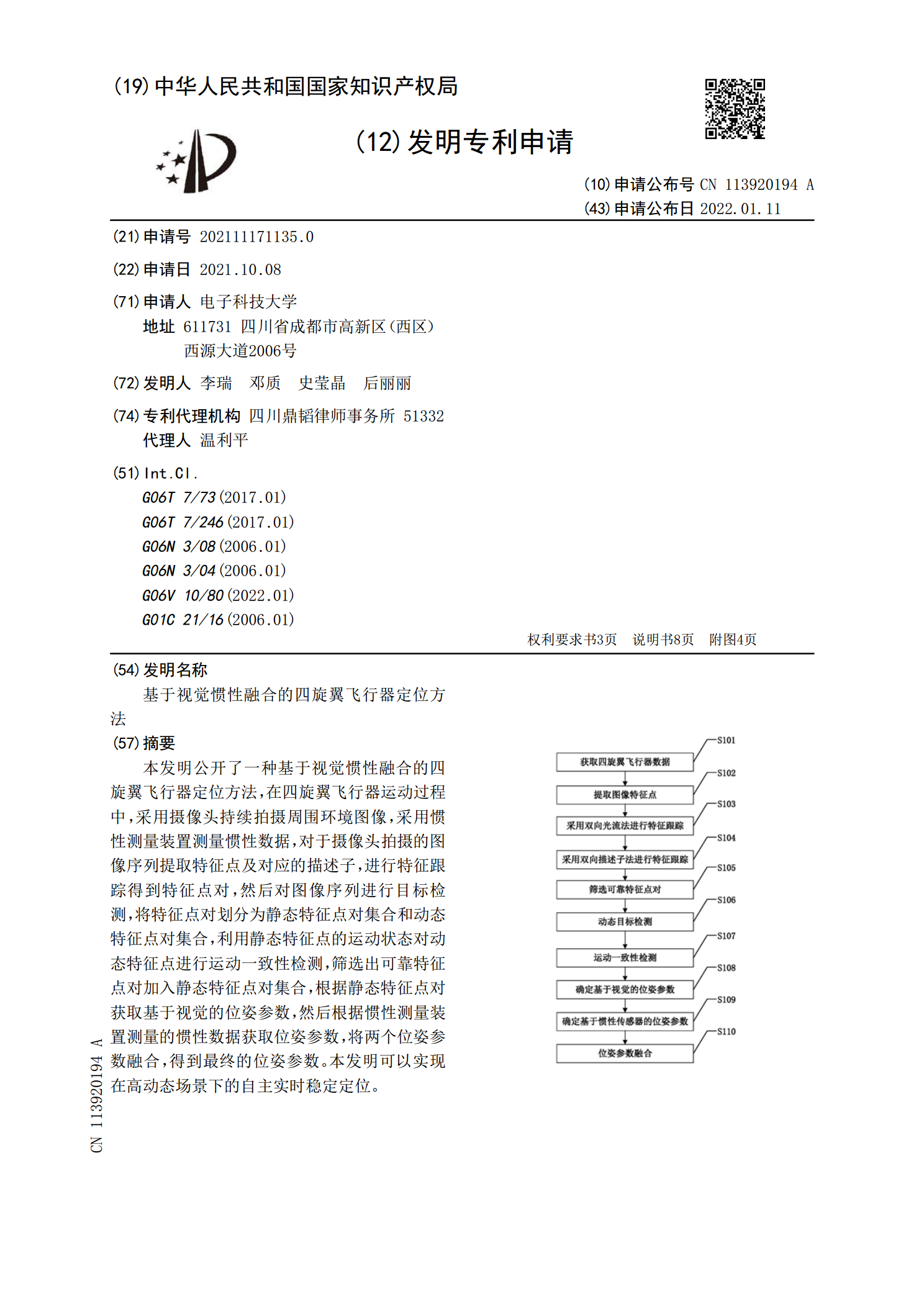
本发明公开了一种基于视觉惯性融合的四旋翼飞行器定位方法,在四旋翼飞行器运动过程中,采用摄像头持续拍摄周围环境图像,采用惯性测量装置测量惯性数据,对于摄像头拍摄的图像序列提取特征点及对应的描述子,进行特征跟踪得到特征点对,然后对图像序列进行目标检测,将特征点对划分为静态特征点对集合和动态特征点对集合,利用静态特征点的运动状态对动态特征点进行运动一致性检测,筛选出可靠特征点对加入静态特征点对集合,根据静态特征点对获取基于视觉的位姿参数,然后根据惯性测量装置测量的惯性数据获取位姿参数,将两个位姿参数融合,得到最

基于视觉里程计与惯导融合技术的四旋翼位姿估计的任务书.docx
基于视觉里程计与惯导融合技术的四旋翼位姿估计的任务书一、任务目标本任务旨在实现基于视觉里程计与惯导融合技术的四旋翼位姿估计算法,通过使用无人机上的摄像头和惯性测量单元(IMU)来估计无人机的位置、速度和姿态。此外,任务还要求实现系统的实时性和鲁棒性,并在实际场景中进行测试以验证其性能。二、任务内容1.算法研究1.1对基于视觉里程计和惯导融合技术的四旋翼位姿估计算法进行研究,了解其原理和实现方法。1.2研究影响位姿估计精度的因素,并对算法进行优化,尽可能提高其精度。1.3实现算法的实时性和鲁棒性,提高算法的

单目视觉惯性里程计硬件平台的研究.docx
单目视觉惯性里程计硬件平台的研究摘要:单目视觉惯性里程计是将单目相机和陀螺仪、加速度计等惯性测量单元(IMU)结合起来,用于在没有外部定位系统(如GPS)的情况下,估计机器人或车辆的运动轨迹和位置。本文对单目视觉惯性里程计的硬件平台进行了研究,包括单目相机、IMU和数据处理单元。通过对硬件平台的比较和分析,确定了适合单目视觉惯性里程计应用的硬件要求,为开发更高效、更精确的单目视觉惯性里程计提供了一定的参考。关键词:单目视觉惯性里程计,硬件平台,单目相机,IMU,数据处理单元引言:随着机器人和自动驾驶技术的