
数字图像处理图像分割和数学形态学学习教案.pptx

快乐****蜜蜂


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共48页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

数字图像处理图像分割和数学形态学学习教案.pptx
会计学阈值(yùzhí)分割法简介阈值(yùzhí)选定阈值(yùzhí)选定阈值(yùzhí)选定算法简介:设灰度直方图为RHST(z),0zN-1(1)在0N-1的范围内变化z,对于每一个灰度值z,在比z小的灰度范围NL内,求一系列的RHST(z1’)-RHST(z)(0z1'<z),找出其中(qízhōng)的最大值为L;(2)同理,在比z大的灰度范围NH内,对于每一个灰度值z,求一系列的RHST(z2')-RHST(z)(z<z2’N-1),找出其中(qízhōng)的最大值为H;(

数字图像处理图像分割和数学形态学.pptx
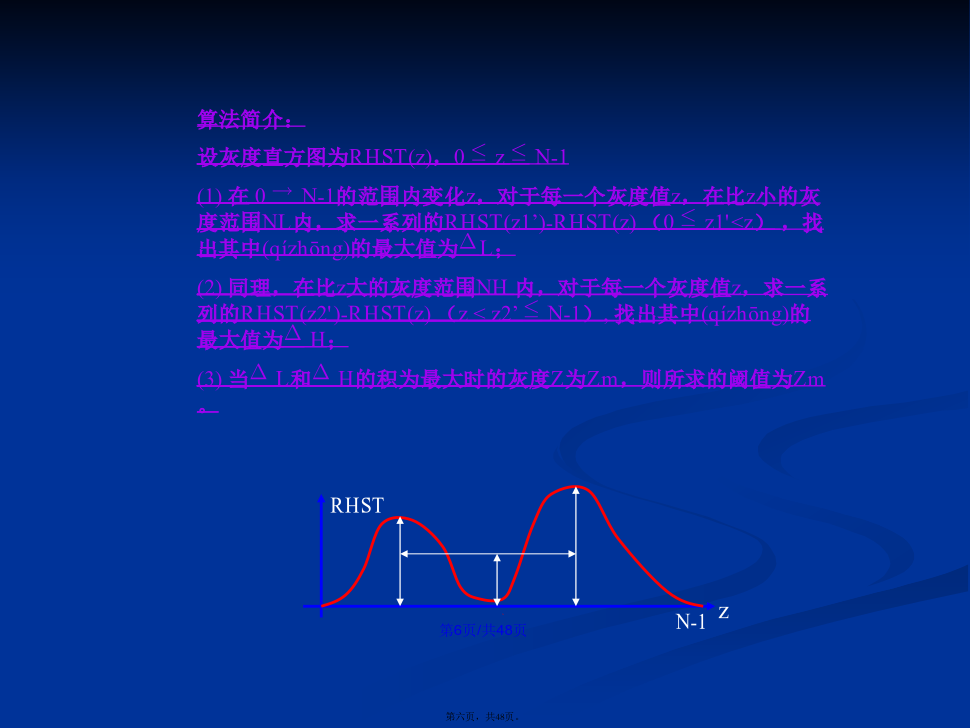
会计学阈值分割法简介阈值选定阈值选定阈值选定算法简介:设灰度直方图为RHST(z),0zN-1(1)在0N-1的范围内变化z,对于每一个灰度值z,在比z小的灰度范围NL内,求一系列的RHST(z1’)-RHST(z)(0z1'<z),找出其中的最大值为L;(2)同理,在比z大的灰度范围NH内,对于每一个灰度值z,求一系列的RHST(z2')-RHST(z)(z<z2’N-1),找出其中的最大值为H;(3)当L和H的积为最大时的灰度Z为Zm,则所求的阈值为Zm。阈值选定阈值选定阈值选定例:

【精选】数字图像处理图像分割和数学形态学.ppt
6.1.4阈值分割法(相似性分割)6.1.4.1阈值分割法简介6.1.4.1阈值分割法简介6.1.4.2阈值选定6.1.4.2阈值选定6.1.4.2阈值选定算法简介:设灰度直方图为RHST(z)0zN-1(1)在0N-1的范围内变化z对于每一个灰度值z在比z小的灰度范围NL内求一系列的RHST(z1’)-RHST(z)(0z1'<z)找出其中的最大值为L;(2)同理在比z大的灰度范围NH内对于每一个灰度值z求一系列的RHST(z2')-RHST(z)(z

数字图像处理与分析形态学图像处理学习教案.pptx
会计学7.1.1集合论中的几个(jǐɡè)基本概念附加(fùjiā):(1):B的反射—关于结构元素的中心(2)(A)z:集合A平移到点z={z1,z2}7.1.2二值图像(túxiànɡ)的逻辑运算2.二值图像(túxiànɡ)的基本逻辑运算7.2膨胀(péngzhàng)与腐蚀7.2.1膨胀(péngzhàng)图示:例题:7.1将裂缝桥接(qiáojiē)起来的形态学膨胀的应用/7.2.2腐蚀(fǔshí)图示:例题(lìtí):7.2使用形态学腐蚀除去图像的某些部分/7.3开操作(cāozuò)和

数字图像处理图像分割与边缘检测学习教案.pptx
数字图像(túxiànɡ)处理图像(túxiànɡ)分割与边缘检测4连通指的是从区域上一点出发(chūfā),可通过4个方向,即上、下、左、右移动的组合,在不越出区域的前提下,到达区域内的任意像素。图像分割有三种不同的途径:将各像素划归到相应物体或区域的像素聚类方法,即区域法;通过直接确定区域间的边界来实现分割的边界方法;首先检测边缘像素,再将边缘像素连接起来构成(gòuchéng)边界形成分割。在图像分割技术中,最常用的是利用阈值化处理进行的图像分割。5.2灰度阈值法分割常用的图像分割方法是把图像灰度