
基于深度强化学习的多AGV系统路径规划的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于深度强化学习的多AGV系统路径规划.docx
基于深度强化学习的多AGV系统路径规划基于深度强化学习的多AGV系统路径规划摘要:近年来,随着物流需求的不断增加,多AGV系统的应用越来越广泛。而在多AGV系统中,路径规划是一个关键的问题。传统的路径规划方法往往无法满足多AGV系统的实时性和效率要求。因此,本论文提出了一种基于深度强化学习的多AGV系统路径规划方法,并对其进行了详细的介绍和分析。1.引言随着物流行业的发展,传统的人工搬运方式已无法满足高效率、低成本的物流需求。因此,多AGV系统作为一种新型的物流搬运方式,逐渐被广泛应用于物流仓库、工厂等领

基于深度强化学习的多AGV系统路径规划的任务书.docx
基于深度强化学习的多AGV系统路径规划的任务书一、背景多自主引导车(AGV)系统已广泛应用于自动化制造、物流和流程控制等领域。在这些系统中,每个AGV都具有自主移动能力和路径规划技术,以保证其能够完成任务。然而,在高度动态和复杂的生产环境中,AGV系统的路径规划至关重要。传统的AGV路径规划算法通常基于静态地图,而不易考虑实时环境变化和动态障碍物。这可能导致路径规划错误和延迟,从而降低了系统的效率和生产能力。深度强化学习是一种新兴的学习方法,已在许多领域中得到广泛应用,如游戏、自动驾驶等。在深度强化学习中

基于深度强化学习的仓储AGV路径优化方法研究的任务书.docx
基于深度强化学习的仓储AGV路径优化方法研究的任务书一、任务目的随着现代物流业的快速发展,仓储AGV(AutomatedGuidedVehicle)已经成为一项十分重要的物流设备。如何优化AGV的路径规划,提高其自主性和效率,已成为当前研究的热点问题之一。本次任务旨在基于深度强化学习对仓储AGV的路径优化方法进行研究和探讨,以实现AGV自主学习和路径规划的智能化,提高AGV的运行效率和物流服务质量。二、任务内容1、仓储AGV路径优化问题的研究和分析综合调研和分析当前仓储AGV路径优化问题,探讨其现有的解决

基于AGV系统的路径规划技术研究的任务书.docx
基于AGV系统的路径规划技术研究的任务书任务书一、任务背景自动引导车(AGV)系统已经成为制造业和物流领域的重要技术之一。AGV系统利用计算机、机器人、感应器等技术来实现自动化运输和流程控制。AGV系统对于提高生产效率、降低成本、提高产品质量、改善作业环境等方面都有着重要的作用。其中,路径规划是AGV系统中的一个关键步骤。AGV系统需要通过路径规划算法获取最优的路径,从而实现自动导航和避障。二、任务内容本次课题的任务是基于AGV系统的路径规划技术研究。具体包括以下内容:1.AGV系统的基本原理和结构:介绍
基于模型预测控制指导深度强化学习的AGV路径规划方法.pdf
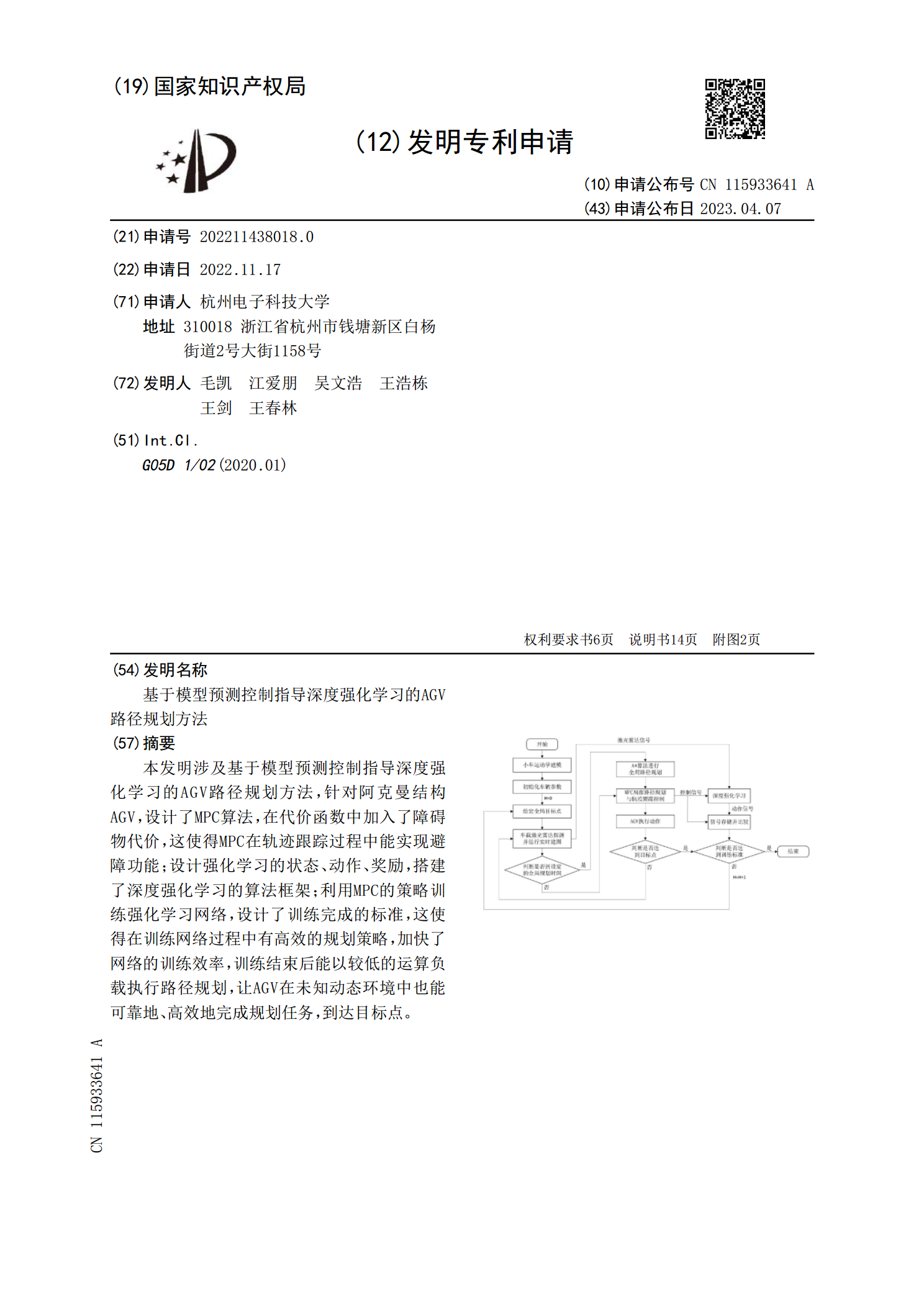
本发明涉及基于模型预测控制指导深度强化学习的AGV路径规划方法,针对阿克曼结构AGV,设计了MPC算法,在代价函数中加入了障碍物代价,这使得MPC在轨迹跟踪过程中能实现避障功能;设计强化学习的状态、动作、奖励,搭建了深度强化学习的算法框架;利用MPC的策略训练强化学习网络,设计了训练完成的标准,这使得在训练网络过程中有高效的规划策略,加快了网络的训练效率,训练结束后能以较低的运算负载执行路径规划,让AGV在未知动态环境中也能可靠地、高效地完成规划任务,到达目标点。