
液态金属液滴驱动的轮式机器人研究的任务书.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

液态金属液滴驱动的轮式机器人研究的任务书.docx
液态金属液滴驱动的轮式机器人研究的任务书任务书一、任务背景随着技术的发展和应用的不断拓展,机器人已经在许多领域得到广泛运用。目前,机器人技术主要包括软体机器人、硬体机器人、液压机器人、电动机器人等。然而,在极端条件下,例如高温、低温、高辐射等环境中,现有的机器人技术难以满足需求。相比之下,液态金属液滴驱动的轮式机器人是一种新兴且有前景的机器人类型。它具有一系列优良特性,例如高受载能力、高射频透过率、高温、高热流密度等,能够在极端条件下稳定运行。因此,液态金属液滴驱动的轮式机器人有着广泛的应用前景,具有重要

液态金属液滴驱动的轮式机器人研究的开题报告.docx
液态金属液滴驱动的轮式机器人研究的开题报告一、选题背景及意义随着人类科技的不断发展,机器人已经成为人类社会中重要的组成部分之一。从最早的机械手臂到现在的智能化、电子化的机器人,机器人不仅可以执行各种复杂的任务,还可以在危险的环境中代替人类进行操作,为人类社会做出了巨大的贡献。目前,机器人的研究方向已经逐步转向了液态金属液滴驱动的轮式机器人。液态金属作为新型的功能材料,在机器人的实际应用中具有很多优势。例如,液态金属可以实现高精度的运动控制,并且具有良好的耐热性和导电性能。因此,本课题拟通过对液态金属液滴驱

电毛细驱动液态金属液滴可寻址运动特性研究.docx
电毛细驱动液态金属液滴可寻址运动特性研究电毛细细驱动液态金属液滴可寻址运动特性研究摘要:随着纳米技术和微流体技术的发展,液态金属液滴在新型电子元件、可变形电子器件和柔性电子器件等领域展示了巨大的潜力。液态金属液滴的运动特性对于其在这些领域的应用至关重要。本文采用电毛细力驱动液态金属液滴运动,并研究了其可寻址运动特性。实验结果表明,通过调节电场强度和方向,可实现对液态金属液滴的精确控制和定位,从而为液态金属液滴在微观尺度的操控和应用提供了重要的理论和实验基础。关键词:液态金属液滴,电毛细力,可寻址运动,微流
一种基于液态金属驱动的轮式机器人.pdf
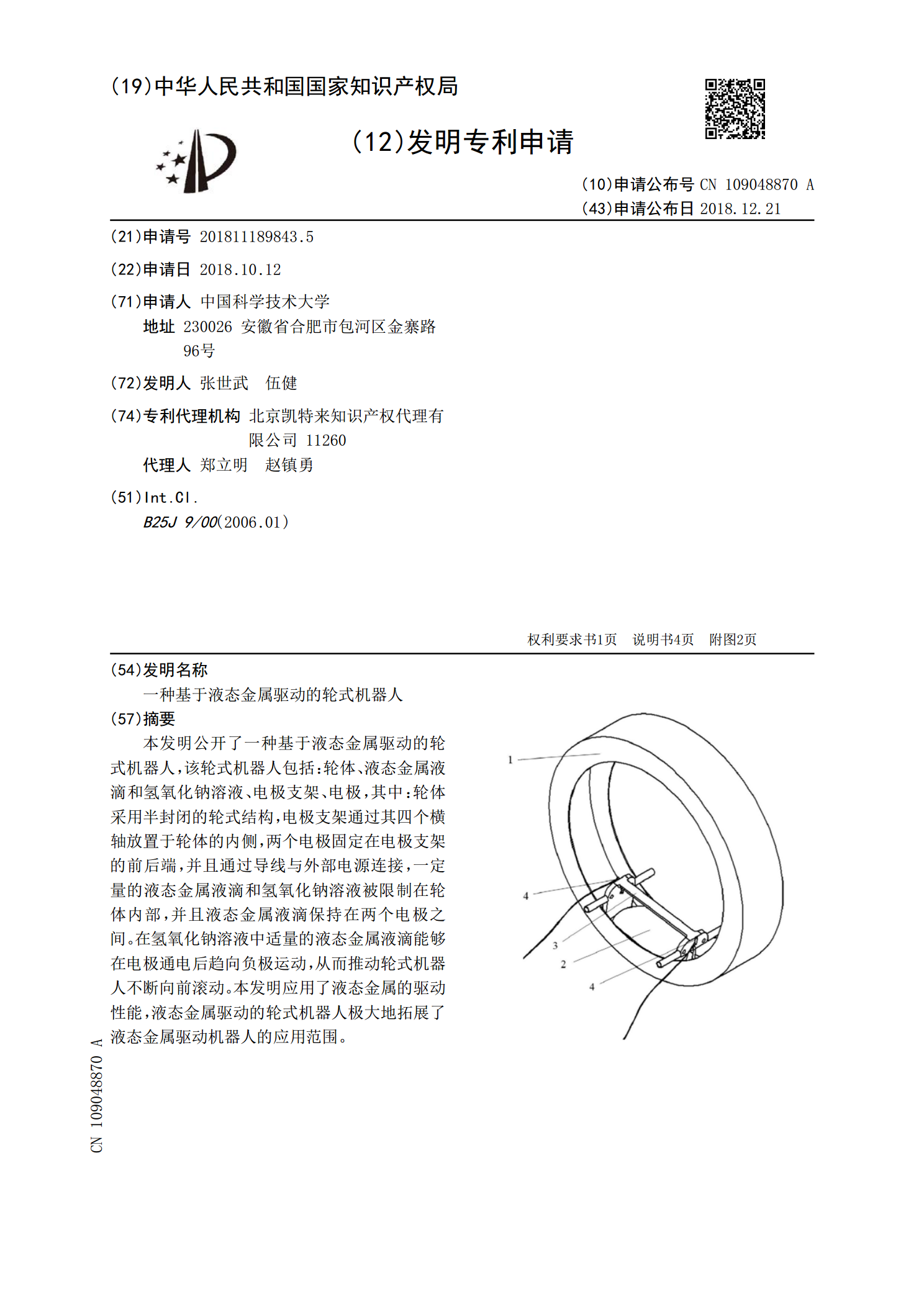
本发明公开了一种基于液态金属驱动的轮式机器人,该轮式机器人包括:轮体、液态金属液滴和氢氧化钠溶液、电极支架、电极,其中:轮体采用半封闭的轮式结构,电极支架通过其四个横轴放置于轮体的内侧,两个电极固定在电极支架的前后端,并且通过导线与外部电源连接,一定量的液态金属液滴和氢氧化钠溶液被限制在轮体内部,并且液态金属液滴保持在两个电极之间。在氢氧化钠溶液中适量的液态金属液滴能够在电极通电后趋向负极运动,从而推动轮式机器人不断向前滚动。本发明应用了液态金属的驱动性能,液态金属驱动的轮式机器人极大地拓展了液态金属驱动

基于液态金属液滴的逻辑器件研究的开题报告.docx
基于液态金属液滴的逻辑器件研究的开题报告一、研究背景逻辑器件在现代电子技术中扮演着重要的角色,其发展成果直接促进了计算机、通信和自动化等领域的快速发展。目前,晶体管是逻辑器件的主要构成元件,然而,其制造和集成过程十分繁琐,如何加速器件制造和提高工作效率成为一个研究热点。近年来,液态金属液滴作为一种新型的逻辑器件材料逐渐受到研究人员的关注。液态金属具有良好的导电性和柔性,可以在快速切换信号的同时保证低功耗,是一种优秀的逻辑器件材料。同时,液态金属液滴可以用来制造可编程电路,使其可以根据具体需要进行程序修改,