
无人移动平台自动跟随技术研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人移动平台自动跟随技术研究的任务书.docx
无人移动平台自动跟随技术研究的任务书任务名称:无人移动平台自动跟随技术研究任务背景:随着无人系统的快速发展,无人移动平台正逐渐成为各行各业的研究热点。在无人移动平台中,自动跟随技术是非常重要的一部分,它可以帮助设备完成自主移动寻址或机器人跟随人的功能。然而,当前大多数的无人移动平台都需要手动控制才能完成跟随任务,并且还受限于环境因素的干扰。因此,开发一种能够自动跟随目标的无人移动平台,实现随时随地自主移动和跟随的功能,具有十分重要的意义。任务目标:本课题旨在研究一种无人移动平台自动跟随技术,实现跟随目标的

无人移动平台自动跟随技术研究的开题报告.docx
无人移动平台自动跟随技术研究的开题报告一、选题背景及意义随着机器人技术的不断发展,无人移动平台越来越成为工业制造、物流配送等领域的研究热点。而在无人移动平台中,自动跟随技术是一种重要的功能,大大提高了系统的智能化程度,实现了无人操作的自动化控制。自动跟随技术广泛应用于无人小车、无人物流车、机器人导航等场景。该技术可以使无人移动平台与人员之间的交互更加自然,降低了操作难度,提高了使用便捷性,大幅度降低了人工操作成本。同时,自动跟随技术也有强大的扩展性,可以更好地适应不同场合和应用场景的需求。本研究旨在探究无
跟随移动平台及其方法.pdf
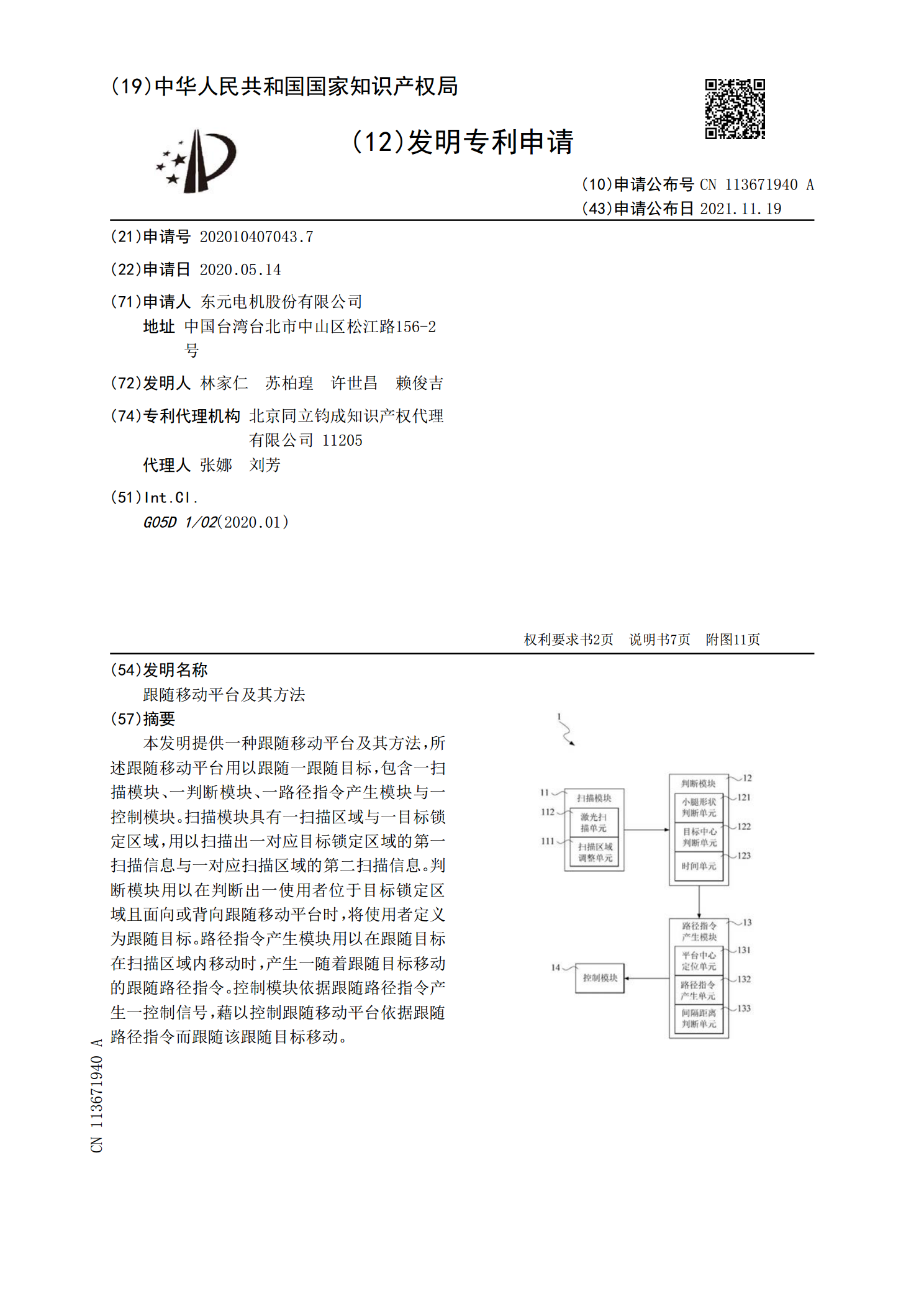
本发明提供一种跟随移动平台及其方法,所述跟随移动平台用以跟随一跟随目标,包含一扫描模块、一判断模块、一路径指令产生模块与一控制模块。扫描模块具有一扫描区域与一目标锁定区域,用以扫描出一对应目标锁定区域的第一扫描信息与一对应扫描区域的第二扫描信息。判断模块用以在判断出一使用者位于目标锁定区域且面向或背向跟随移动平台时,将使用者定义为跟随目标。路径指令产生模块用以在跟随目标在扫描区域内移动时,产生一随着跟随目标移动的跟随路径指令。控制模块依据跟随路径指令产生一控制信号,藉以控制跟随移动平台依据跟随路径指令而跟

基于水下无人移动平台的多目标被动跟踪技术研究的任务书.docx
基于水下无人移动平台的多目标被动跟踪技术研究的任务书一、背景在海洋勘探、资源开发、水下作业等领域,水下无人机的应用越来越广泛。水下无人移动平台可以搭载多种传感器,包括声学、光学、电磁等,用于水下目标探测、跟踪和识别。在水下多目标跟踪任务中,被动跟踪技术具有重要意义。被动跟踪技术不需要主动干扰目标,只需要从目标发出的信号中提取信息,即可实现目标的跟踪。因此,被动跟踪技术对于海底环境保护、水下情报收集、海洋生物监测等方面具有重大应用价值。本任务书旨在探讨基于水下无人移动平台的多目标被动跟踪技术研究,力求实现对

基于UWB的无人车自动跟随实验研究.docx
基于UWB的无人车自动跟随实验研究摘要本文基于UWB技术实现无人车自动跟随的研究,通过对UWB技术的原理、无人车技术的应用以及自动控制系统等方面进行深入分析,以探讨UWB技术在无人车自动跟随领域的应用前景。在实验研究方面,本文通过搭建实验平台,对UWB定位模块、无人车以及控制系统等进行了测试,获得较为稳定的实验数据。最终实验结果表明,UWB技术能够提供较为准确的位置信息,且无人车可以在UWB的控制下实现自动跟随。关键词:UWB技术;无人车;自动控制;实验研究;自动跟随AbstractThispaperis