
基于雷达和视觉融合的行人检测方法研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于雷达和视觉融合的行人检测方法研究的开题报告.docx
基于雷达和视觉融合的行人检测方法研究的开题报告开题报告:一、研究背景随着自动驾驶技术的不断发展,行人检测便成为了自动驾驶技术中不可或缺的一部分。其中,基于雷达和视觉相结合的行人检测方法,能够将雷达数据和图像数据融合,提高检测精度,从而更有效地解决行人检测的问题。此外,由于行人是道路上最危险的目标之一,因此行人检测不仅可以提高自动驾驶汽车的安全性能,也能够减少交通事故的发生。因此,基于雷达和视觉融合的行人检测方法研究具有重要意义。二、研究目的本文的主要研究目的为:探究基于雷达和视觉融合的行人检测方法,并实现

雷达与视觉信息融合的行人检测方法.docx
雷达与视觉信息融合的行人检测方法标题:雷达与视觉信息融合的行人检测方法引言:随着自动驾驶车辆的快速发展,行人检测技术在汽车安全领域变得越来越重要。传统的行人检测方法主要基于视觉信息,但是受到光照、天气和背景干扰等因素影响较大。为了提高行人检测的准确率和稳定性,将雷达与视觉信息进行融合可以大大提升行人检测的性能。本论文将重点探讨雷达与视觉信息融合的行人检测方法及其在自动驾驶领域的应用。一、背景介绍:1.行人检测的重要性及挑战2.基于视觉信息的行人检测方法3.雷达技术在行人检测中的优势和应用二、雷达与视觉信息
基于毫米波雷达和视觉融合的道路行人快速检测方法.pdf
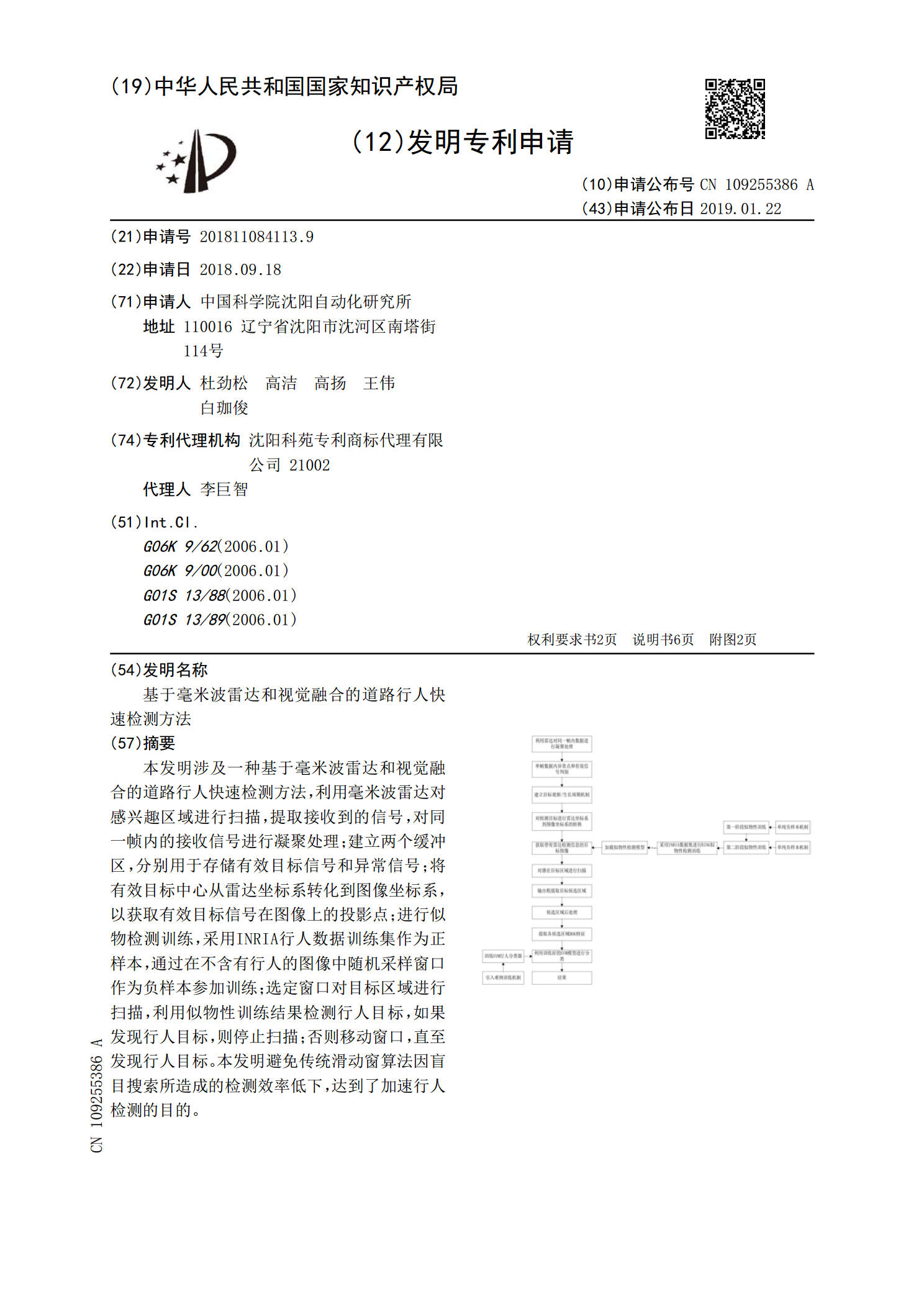
本发明涉及一种基于毫米波雷达和视觉融合的道路行人快速检测方法,利用毫米波雷达对感兴趣区域进行扫描,提取接收到的信号,对同一帧内的接收信号进行凝聚处理;建立两个缓冲区,分别用于存储有效目标信号和异常信号;将有效目标中心从雷达坐标系转化到图像坐标系,以获取有效目标信号在图像上的投影点;进行似物检测训练,采用INRIA行人数据训练集作为正样本,通过在不含有行人的图像中随机采样窗口作为负样本参加训练;选定窗口对目标区域进行扫描,利用似物性训练结果检测行人目标,如果发现行人目标,则停止扫描;否则移动窗口,直至发现行

基于视觉注意机制的行人检测方法研究的开题报告.docx
基于视觉注意机制的行人检测方法研究的开题报告一、研究背景行人检测技术是计算机视觉领域的一项关键技术,它在实现了自动驾驶、智能安防、场馆监测等多个领域的运用。传统的行人检测算法主要采用基于图像的模式识别算法进行实现,但是这些方法在处理大量类别多样、复杂的背景场景时存在效率和准确度低的缺点,因此如何提高行人检测算法的准确率和实时性是当前研究的热点。视觉注意机制是近年来被广泛应用于计算机视觉和大脑认知领域的一种方法。该方法模仿人类注意机制,通过模拟大脑对图像信息的高效筛选、提取与分析,能够对图像的特定区域进行提

道路行人特征视觉检测方法研究的开题报告.docx
道路行人特征视觉检测方法研究的开题报告一、研究背景及意义近年来,随着自动驾驶技术的不断发展和普及,道路行人特征视觉检测成为了一个备受关注的研究领域。道路行人特征视觉检测主要是指利用计算机视觉技术对图像或视频中的行人进行特征识别,从而实现对其身份、行为等方面的分析。道路行人特征视觉检测的研究意义在于提高自动驾驶车辆的安全性能和智能化水平。随着城市化进程的不断推进和人口数量的持续增长,道路交通越来越繁忙,交通事故频发。因此,对行人进行准确、快速的识别和跟踪,能帮助自动驾驶车辆及时地作出反应,从而减少交通事故的