
基于改进PID控制的悬架机器人路径跟踪节能仿真研究.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进PID控制的悬架机器人路径跟踪节能仿真研究.pptx
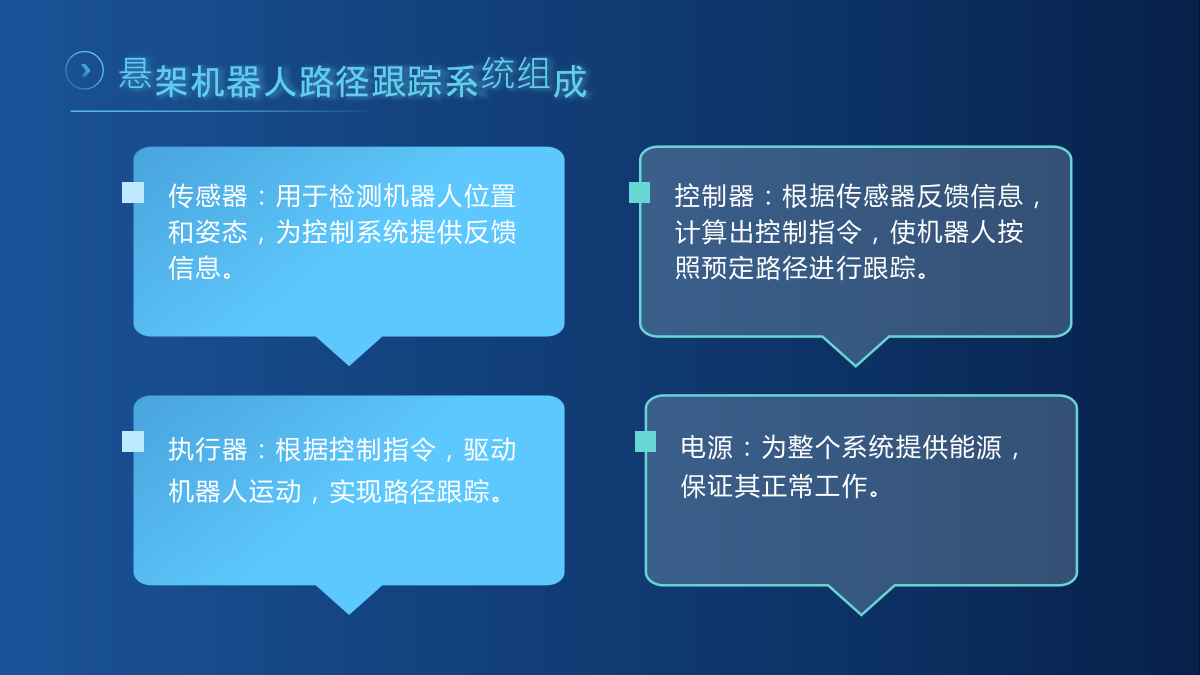
汇报人:CONTENTS添加章节标题PID控制算法原理PID控制算法简介PID控制算法工作原理PID控制算法优缺点悬架机器人路径跟踪系统悬架机器人简介悬架机器人路径跟踪系统组成悬架机器人路径跟踪系统工作原理改进PID控制算法在悬架机器人路径跟踪系统中的应用改进PID控制算法简介改进PID控制算法在悬架机器人路径跟踪系统中的实现方式改进PID控制算法在悬架机器人路径跟踪系统中的优势节能仿真研究节能仿真研究简介节能仿真研究方法节能仿真研究结果分析节能仿真研究结论结论与展望研究结论研究展望汇报人:

基于改进模糊PID的全向搬运机器人路径跟踪控制研究.docx
基于改进模糊PID的全向搬运机器人路径跟踪控制研究摘要本文针对全向搬运机器人路径跟踪控制问题,提出了一种基于改进模糊PID控制的方法。通过引入模糊控制和PID控制相结合的方法,有效地提高了控制系统的性能。经过仿真实验,发现该算法能够有效的实现全向搬运机器人路径跟踪控制。关键词:全向搬运机器人,路径跟踪,模糊PID控制引言随着科技的发展,机器人技术在制造业、物流等领域得到了广泛应用。全向搬运机器人作为非常重要的机器人之一,具有载重能力强、操作方便等诸多优点,因此得到了广泛的关注。然而,由于全向搬运机器人的机

基于改进PID控制的汽车主动悬架系统研究.docx
基于改进PID控制的汽车主动悬架系统研究摘要:汽车主动悬架系统在提高车辆行驶安全性和舒适性方面发挥着重要作用。本文对基于改进PID控制的汽车主动悬架系统进行了研究。首先,介绍了汽车主动悬架系统的原理和发展历程。然后,详细介绍了PID控制的基本原理以及其在汽车主动悬架系统中的应用。接下来,针对PID控制的局限性,提出了改进PID控制的方法,包括模糊PID控制、自适应PID控制和模型预测PID控制。通过对比实验研究,验证了改进PID控制方法的有效性。最后,对汽车主动悬架系统的未来发展提出了展望。1.引言汽车主

基于模糊神经网络PID的机器人路径跟踪控制.docx
基于模糊神经网络PID的机器人路径跟踪控制一、绪论机器人是指一种能够代替人类执行某些任务的自动化机械设备,具有很强的灵活性、适应性和智能性。机器人技术的快速发展和广泛应用,为人们的生产和生活提供了极大的便利。在机器人的应用中,路径跟踪控制是一个重要的研究方向。路径跟踪控制是指机器人在运动时,根据所预设的路径,实现稳定的运动控制。传统的PID控制器是一种经典的控制方法,具有简单、稳定、可靠的优点,在机器人控制中经常应用。但是,传统PID控制器存在参数调整困难、系统响应慢、鲁棒性差等问题。为了提高机器人的运动

基于改进鲸鱼算法的半主动悬架PID控制.docx
基于改进鲸鱼算法的半主动悬架PID控制基于改进鲸鱼算法的半主动悬架PID控制摘要:悬架系统是汽车中的重要组成部分,对行驶的稳定性和舒适性起着至关重要的作用。本文提出了一种基于改进鲸鱼算法的半主动悬架PID控制方法,通过调整PID控制器的参数来实现悬架系统的优化控制。鲸鱼算法是一种新兴的元启发式算法,可以用于求解优化问题。通过将鲸鱼算法与PID控制相结合,可以有效地提高悬架系统的性能。实验结果表明,该方法在减小车辆的振动和提高悬架舒适性方面具有良好的效果。关键词:悬架系统,PID控制,鲸鱼算法,半主动控制1