
工业机器人运动模型构建研究.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工业机器人运动模型构建研究.pptx
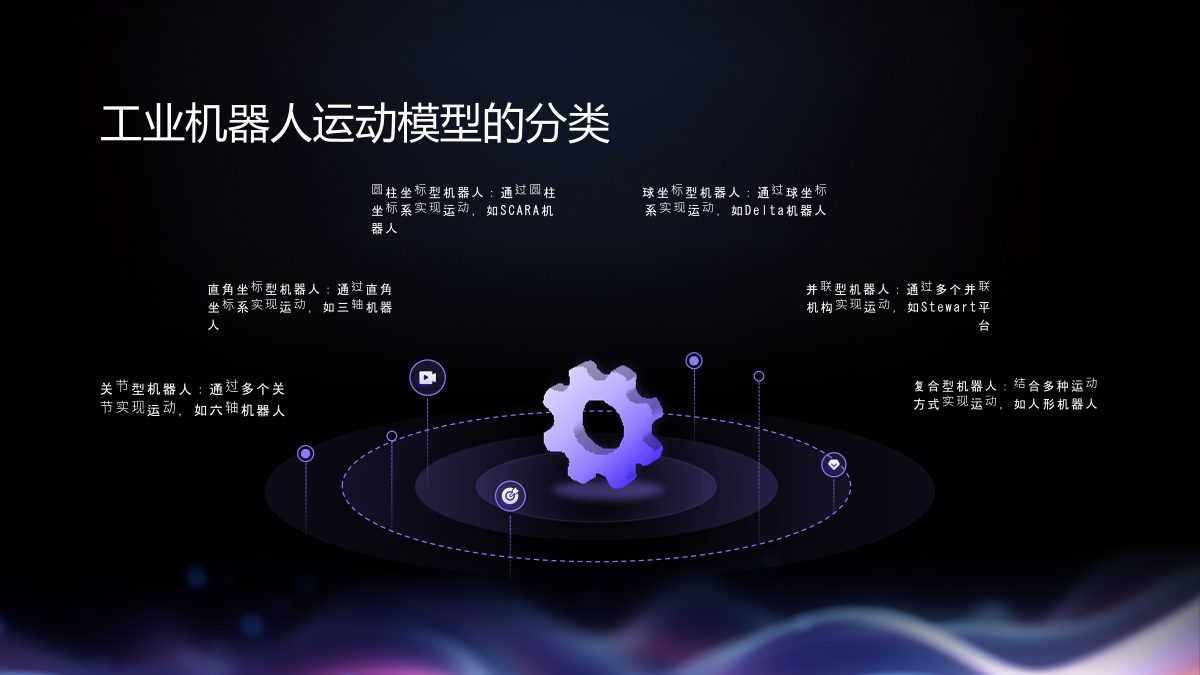
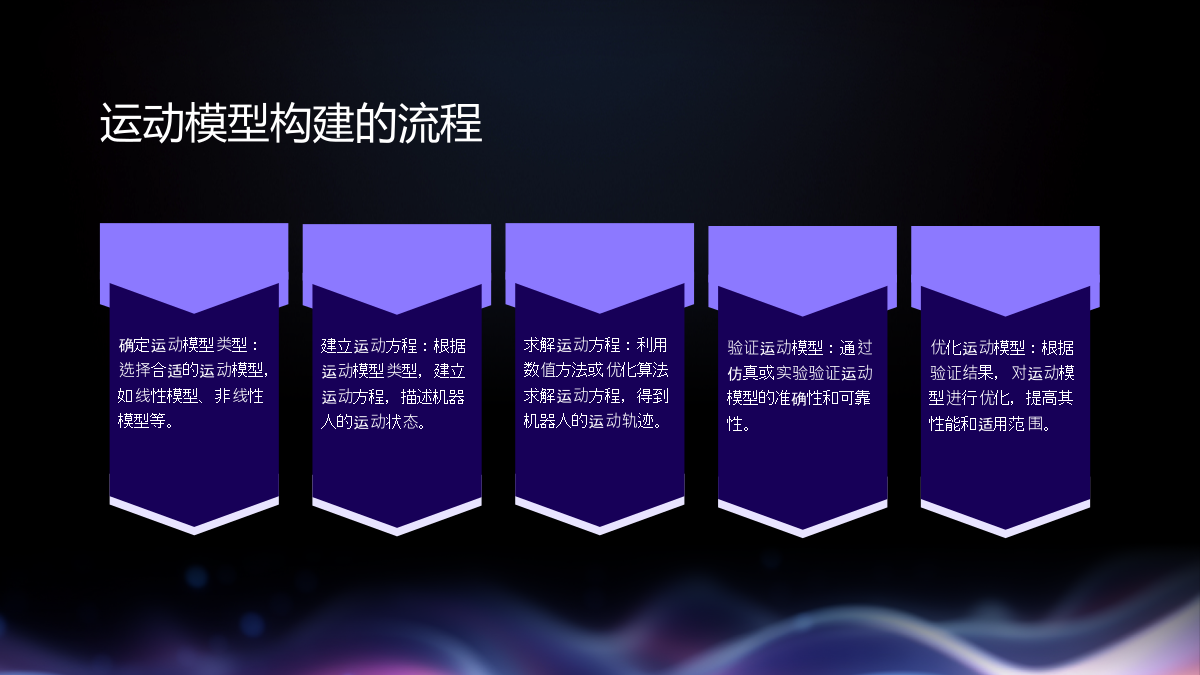
工业机器人运动模型构建研究01工业机器人运动模型概述运动模型的定义和作用工业机器人运动模型的分类运动模型构建的流程工业机器人运动模型的数学基础坐标系及其变换运动学方程的建立动力学方程的建立工业机器人运动模型的构建方法基于正向运动学的模型构建基于逆向运动学的模型构建基于混合运动学的模型构建工业机器人运动模型的验证与优化模型验证的方法和标准模型优化的目标和策略模型优化算法和实现工业机器人运动模型的应用场景和案例分析搬运场景中的应用装配场景中的应用焊接场景中的应用其他应用场景及案例分析工业机器人运动模型的发展趋

基于运动模型的工业机器人定位误差补偿分析研究.docx
基于运动模型的工业机器人定位误差补偿分析研究摘要:工业机器人定位误差补偿是提高机器人精度和稳定性的关键问题。本文基于运动模型分析了工业机器人定位误差的来源及其补偿方法,并通过实验验证了该方法的有效性。结果表明,本文提出的基于运动模型的补偿方法能有效提高工业机器人的定位精度和稳定性,为实际机器人应用提供了理论基础。关键词:工业机器人;定位误差;补偿方法;运动模型引言:工业机器人广泛应用于生产加工、自动化装配、材料搬运等领域,其定位精度和稳定性对生产效率和产品质量具有重要影响。然而,由于运动控制系统的复杂性、

基于改进RBF的工业机器人轨迹跟踪模型构建及仿真.docx
基于改进RBF的工业机器人轨迹跟踪模型构建及仿真标题:基于改进RBF的工业机器人轨迹跟踪模型构建及仿真摘要:随着工业机器人在制造业中的广泛应用,轨迹跟踪技术对工业机器人的精确操作和生产效率的提升起到关键作用。本文提出了一种基于改进径向基函数网络(RBF)的工业机器人轨迹跟踪模型,通过对机器人关节空间的最优控制实现精确的轨迹跟踪,并通过仿真实验验证了该模型的有效性。1.引言工业机器人是一种能够执行各种复杂任务的可编程机械设备,广泛应用于制造业。轨迹跟踪是工业机器人系统中的一个重要问题,能够实现精确的路径规划

基于运动模型的工业机器人定位误差补偿分析研究的中期报告.docx
基于运动模型的工业机器人定位误差补偿分析研究的中期报告一、研究背景和意义:工业机器人的定位误差一直是制约其高精度运动控制的主要因素之一。尤其对于一些需要高精度定位的应用场景,如微电子芯片制造、激光切割等,对机器人的定位精度要求更高。定位误差来源于多方面因素,如外部干扰、系统参数误差、机器人本身的结构刚度等,这些因素会对机器人的运动模型产生影响,从而导致机器人的定位误差。针对这些问题,本研究将从运动模型入手,对机器人的定位误差进行补偿,提高机器人的定位精度,提高生产效率和产品质量。二、研究方法:本研究将基于

融合工业机器人的智能操作平台的构建研究.pptx
融合工业机器人的智能操作平台的构建研究目录智能操作平台概述定义与功能平台构建的必要性平台的应用场景工业机器人技术工业机器人种类工业机器人的技术特点工业机器人的发展趋势智能操作平台的系统架构系统架构设计硬件设备选型软件系统开发智能操作平台的算法研究机器学习算法深度学习算法路径规划算法智能操作平台的实践应用应用案例分析实际应用中的问题与解决方案未来应用展望智能操作平台的挑战与展望技术挑战未来发展方向跨领域合作的可能性THANKYOU