
基于改进RRT算法的巡飞弹快速航迹规划方法.pptx

快乐****蜜蜂


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进RRT算法的巡飞弹快速航迹规划方法.pptx
添加副标题目录PART01RRT算法的基本原理RRT算法的优缺点RRT算法的应用场景PART02改进RRT算法的思路改进RRT算法的关键技术改进RRT算法的实现过程PART03巡飞弹航迹规划的难点改进RRT算法在巡飞弹航迹规划中的优势改进RRT算法在巡飞弹航迹规划中的具体应用PART04实验环境与数据集实验过程与结果结果分析对比分析PART05本文工作总结未来研究方向感谢您的观看

基于改进RRT算法的无人机实时航迹规划.docx
基于改进RRT算法的无人机实时航迹规划基于改进RRT算法的无人机实时航迹规划摘要:无人机在近年来得到了广泛的应用,其中航迹规划是无人机任务的一个重要组成部分。然而,传统的航迹规划算法在实时性和路径优化方面存在一些不足。本文针对这一问题,提出了一种基于改进RRT(快速随机探索树)算法的无人机实时航迹规划方法。在改进RRT算法中,引入了路径优化策略,通过动态调整搜索空间和采样策略,使得无人机的航迹更加平滑和高效。实验结果表明,该方法能够有效地进行航迹规划,并在路径优化上具有明显的优势。关键词:无人机;航迹规划

基于改进RRT算法的四旋翼无人机航迹规划.docx
基于改进RRT算法的四旋翼无人机航迹规划摘要随着无人机技术的快速发展,四旋翼无人机在农业、消防、监测等领域得到了广泛应用。然而,无人机的航迹规划问题一直是一个具有挑战性的问题。传统的航迹规划算法在复杂环境中存在局限性,容易陷入局部最优解。为了解决这个问题,本文基于改进的快速扩展随机树(RRT)算法,提出了一种高效的四旋翼无人机航迹规划方法。通过引入路径质量评估指标和避障机制,本文提高了无人机航迹规划的性能和可靠性。在实验结果中,本文的方法相比传统的RRT算法在航迹规划的效果上有明显的改进。引言四旋翼无人机

基于改进RRT-Connect的无人机航迹规划算法.docx
基于改进RRT-Connect的无人机航迹规划算法Title:ImprovedRRT-ConnectAlgorithmforUnmannedAerialVehicleTrajectoryPlanningAbstract:UnmannedAerialVehicles(UAVs)havegainedsignificantpopularityduetotheirapplicationinvariousfieldssuchassurveillance,reconnaissance,anddeliveryservi
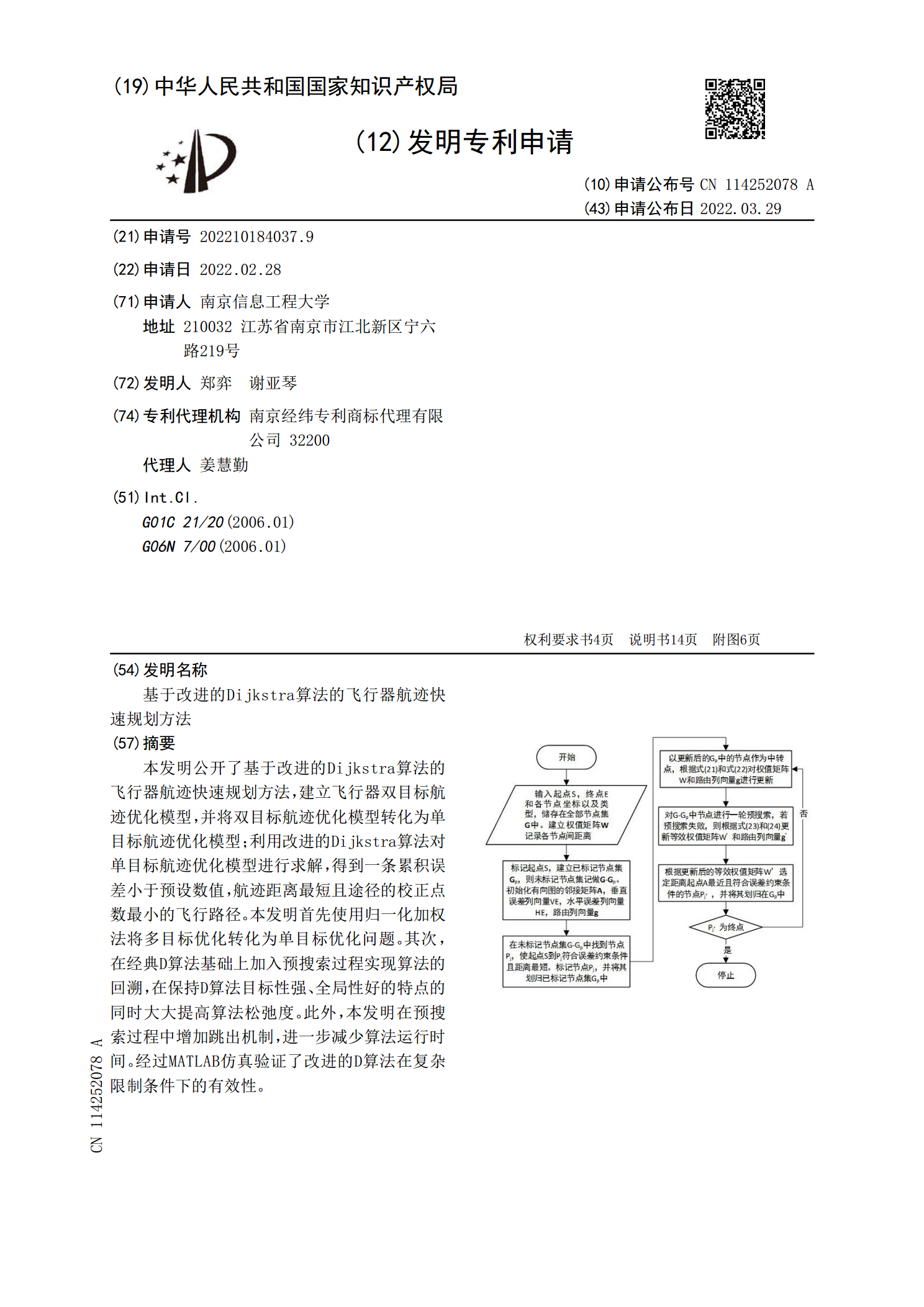
基于改进的Dijkstra算法的飞行器航迹快速规划方法.pdf
本发明公开了基于改进的Dijkstra算法的飞行器航迹快速规划方法,建立飞行器双目标航迹优化模型,并将双目标航迹优化模型转化为单目标航迹优化模型;利用改进的Dijkstra算法对单目标航迹优化模型进行求解,得到一条累积误差小于预设数值,航迹距离最短且途径的校正点数最小的飞行路径。本发明首先使用归一化加权法将多目标优化转化为单目标优化问题。其次,在经典D算法基础上加入预搜索过程实现算法的回溯,在保持D算法目标性强、全局性好的特点的同时大大提高算法松弛度。此外,本发明在预搜索过程中增加跳出机制,进一步减少算法