
面向城市环境的四旋翼无人机在线避障航迹规划方法.pptx

快乐****蜜蜂

1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

面向城市环境的四旋翼无人机在线避障航迹规划方法.pptx
汇报人:/目录01无人机航迹规划的定义无人机航迹规划的重要性无人机航迹规划的难点02四旋翼无人机的结构特点四旋翼无人机的控制特点四旋翼无人机在城市环境中的适用性03避障传感器及工作原理避障算法及工作原理在线航迹规划算法及工作原理04无人机初始位置和目标位置的确定无人机航迹的生成和优化无人机避障和调整航迹的过程模拟05评估指标和测试环境的确定无人机航迹规划的实时性测试无人机航迹规划的准确性和鲁棒性测试06提高航迹规划的精度和效率增强无人机的自主导航能力扩大无人机在城市环境中的应用范围汇报人:
多旋翼无人机自动避障方法.pdf
本发明属于无人机技术领域,尤指一种多旋翼无人机自动避障方法。本发明使用MATLAB双目相机标定工具箱对相机进行标定,采用SGM算法计算出相机左右视图的视差图,利用三角测距原理求取场景的三维点云信息,提出了基于二维轮廓图的三维轮廓提取方法。本发明实现了利用双目摄像头和MATLAB中的工具对环境进行感知,并在此基础上,利用遗传算法和伪谱法分别进行四旋翼无人机避障轨迹优化。

面向智慧避障的物流无人机航迹规划研究.docx
面向智慧避障的物流无人机航迹规划研究面向智慧避障的物流无人机航迹规划研究摘要:随着物流业务的不断发展和无人机技术的成熟,物流无人机正成为未来物流配送领域的重要工具。然而,无人机在进行航迹规划时面临着很多挑战,其中最重要的是避障问题。本论文旨在研究面向智慧避障的物流无人机航迹规划方法,通过综合运用计算机视觉技术、机器学习算法和路径规划算法,实现物流无人机的智慧避障,提高物流配送的效率和安全性。论文首先介绍了无人机航迹规划的研究背景和意义,然后分析了无人机航迹规划中遇到的障碍及现有方法的局限性,接着介绍了智慧
双桨避障旋翼无人机.pdf
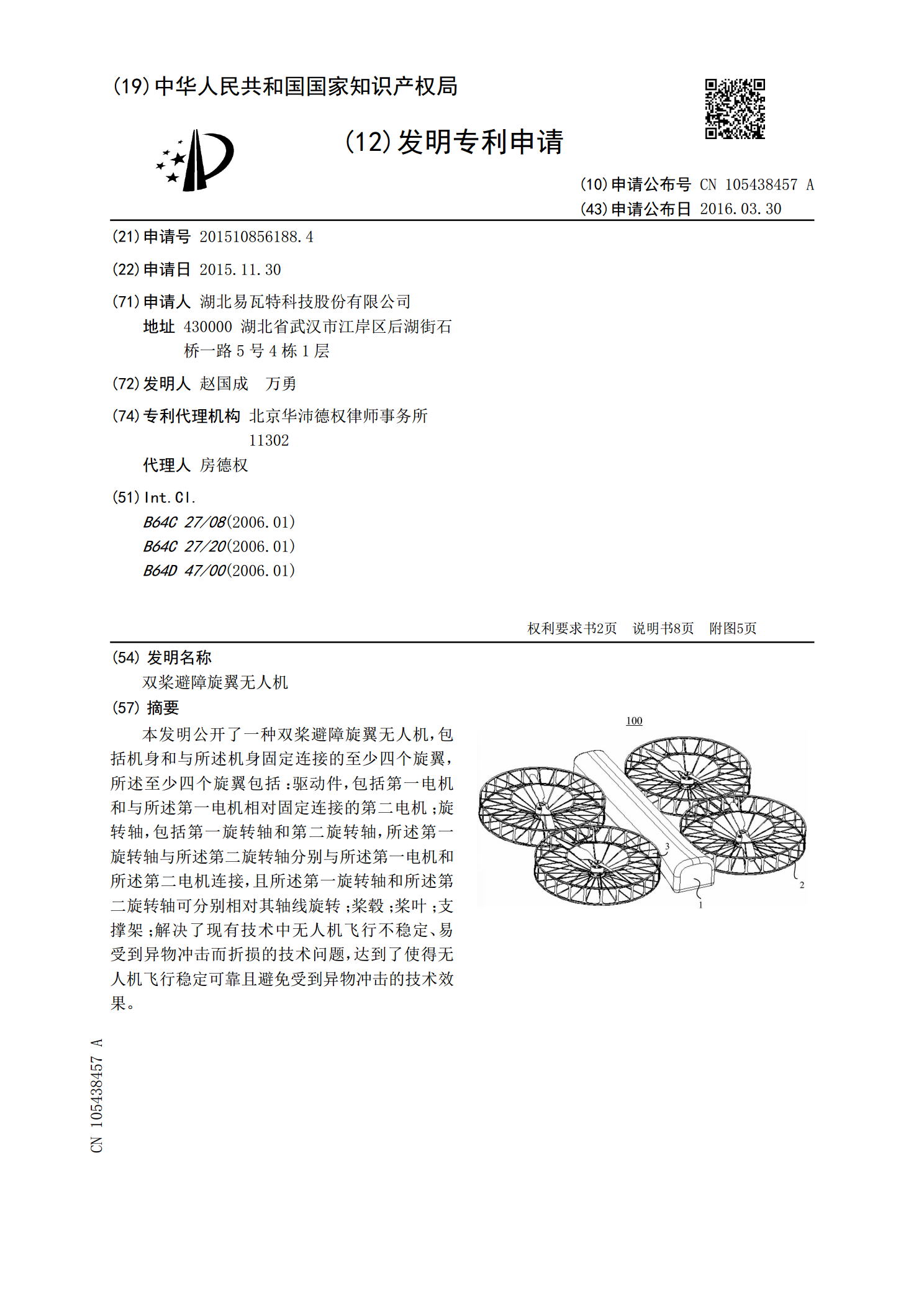
本发明公开了一种双桨避障旋翼无人机,包括机身和与所述机身固定连接的至少四个旋翼,所述至少四个旋翼包括:驱动件,包括第一电机和与所述第一电机相对固定连接的第二电机;旋转轴,包括第一旋转轴和第二旋转轴,所述第一旋转轴与所述第二旋转轴分别与所述第一电机和所述第二电机连接,且所述第一旋转轴和所述第二旋转轴可分别相对其轴线旋转;桨毂;桨叶;支撑架;解决了现有技术中无人机飞行不稳定、易受到异物冲击而折损的技术问题,达到了使得无人机飞行稳定可靠且避免受到异物冲击的技术效果。

面向智慧避障的物流无人机航迹规划研究的开题报告.docx
面向智慧避障的物流无人机航迹规划研究的开题报告一、研究背景与意义随着物流业务的不断发展,物流配送领域的无人机技术越来越突出。无人机因其灵活性和高效性,已经成为物流配送的一种重要改变方式。随着无人机的普及,人们发现无人机存在飞行中发生事故或者撞击障碍物的风险。为了避免这些风险,需要开展面向智慧避障的无人机飞行研究,使无人机在航行时通过智能的感知和识别等技术规避障碍物,避免发生安全事故。本研究主要以面向智慧避障的物流无人机航迹规划技术为研究内容,针对无人机在飞行过程中存在的风险和问题进行探讨。首先,本研究将分