
基于改进YOLOv5的无人船视角目标检测方法.docx

wk****31


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进YOLOv5的无人船视角目标检测方法.docx
基于改进YOLOv5的无人船视角目标检测方法目录一、内容概括................................................11.研究背景及意义........................................21.1目标检测技术的发展现状.............................31.2无人船视角目标检测的重要性.........................41.3研究目的与意义..............................

一种基于改进YOLOv5的密集小目标检测方法.pdf
本发明公开了一种基于改进YOLOv5算法的密集小目标检测方法,该方法对YOLOv5算法做出了进一步的改进。其思想为(1)在YOLOv5骨干提取网络中添加协调注意力机制(CA),通过把位置信息嵌入到通道注意力,从而使移动网络获得更大区域的信息而避免引入大的开销;(2)在YOLOv5的特征融合网络中,使用BiFPN代替PANet,引入权重,更好的平衡不同尺度的特征信息;(3)针对密集、相互遮挡的小目标,使用VarifocalLoss来训练密集目标,使得网络模型面对大面积聚簇重叠的目标时,能够准确识别。对物体
一种基于改进YOLOv5的目标识别检测方法.pdf
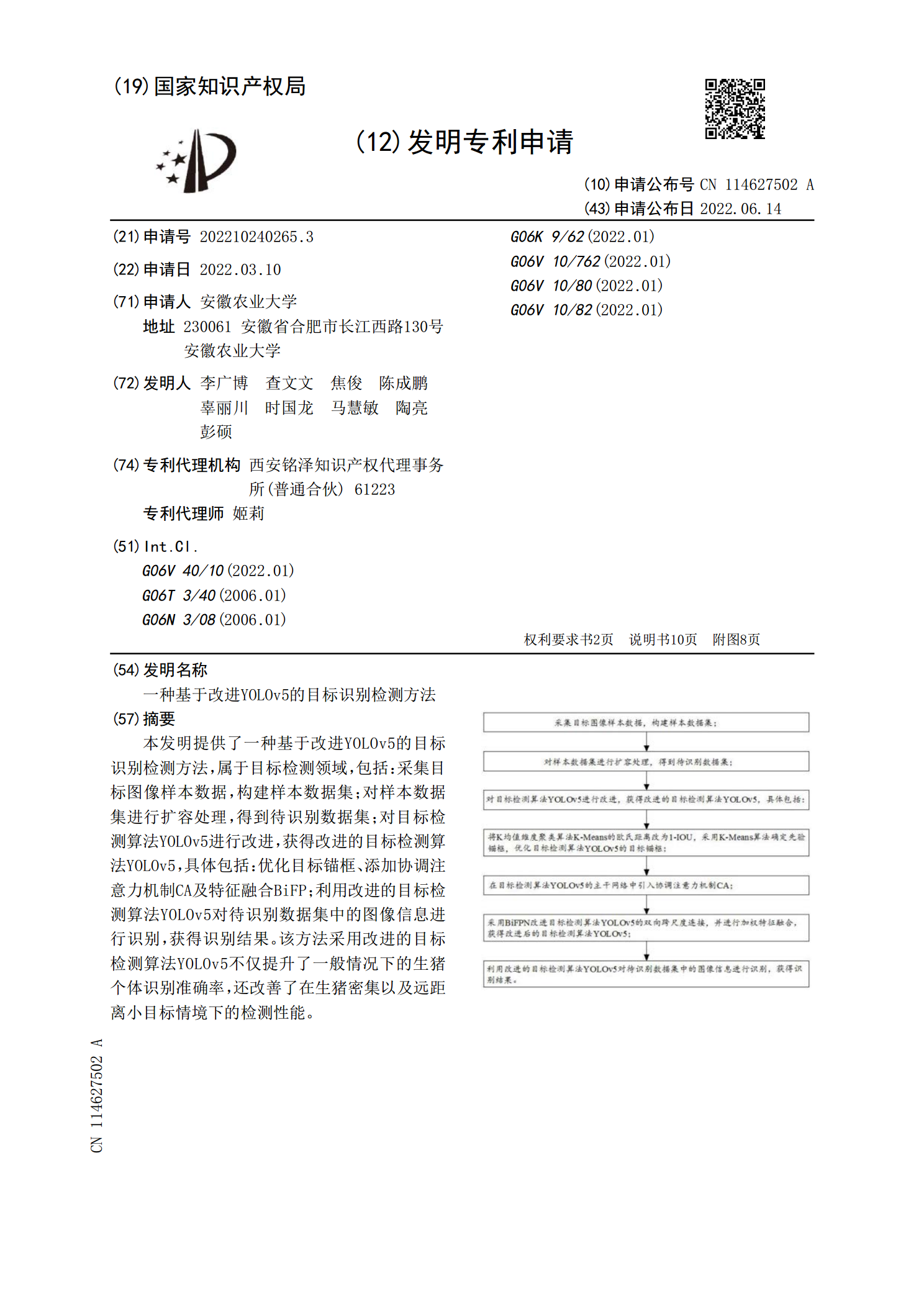
本发明提供了一种基于改进YOLOv5的目标识别检测方法,属于目标检测领域,包括:采集目标图像样本数据,构建样本数据集;对样本数据集进行扩容处理,得到待识别数据集;对目标检测算法YOLOv5进行改进,获得改进的目标检测算法YOLOv5,具体包括:优化目标锚框、添加协调注意力机制CA及特征融合BiFP;利用改进的目标检测算法YOLOv5对待识别数据集中的图像信息进行识别,获得识别结果。该方法采用改进的目标检测算法YOLOv5不仅提升了一般情况下的生猪个体识别准确率,还改善了在生猪密集以及远距离小目标情境下的检

基于改进YOLOv5的路面坑洼检测方法.pptx
汇报人:目录PARTONEPARTTWOYOLOv5算法原理YOLOv5算法特点YOLOv5算法应用场景PARTTHREE路面坑洼对交通安全的影响路面坑洼检测的必要性路面坑洼检测技术的发展现状PARTFOUR改进YOLOv5算法的思路改进YOLOv5算法的关键技术改进YOLOv5算法的优势与局限性PARTFIVE实验数据集介绍实验环境与参数设置实验结果分析与其他算法的比较PARTSIX基于改进YOLOv5的路面坑洼检测方法的有效性对未来研究的建议与展望THANKYOU

改进YOLOv5的道路车辆目标检测方法.docx
改进YOLOv5的道路车辆目标检测方法目录一、内容概要................................................1二、背景介绍................................................2三、改进目标及意义..........................................3四、改进方法................................................54.1数据预处理优化.......