
冗余混联式钻铆机床姿态调整轨迹优化.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

冗余混联式钻铆机床姿态调整轨迹优化.pptx
,目录PartOnePartTwo定义与工作原理结构特点与优势应用领域与市场需求PartThree提高加工精度和效率降低能耗与减少磨损提升产品质量与可靠性PartFour优化目标与评价指标参数优化与调整算法设计与实现仿真验证与实验分析PartFive实际应用中的问题与挑战典型案例的优化过程与效果经验总结与推广价值PartSix新技术新方法的探索与应用提高自动化与智能化水平拓展应用领域与市场前景THANKS

基于冗余联动的六轴联动数控机床加工轨迹误差优化.docx
基于冗余联动的六轴联动数控机床加工轨迹误差优化基于冗余联动的六轴联动数控机床加工轨迹误差优化摘要:随着制造业的发展,越来越多的复杂工件需要使用六轴联动数控机床进行加工。然而,由于机床结构和加工轨迹的限制,加工过程中会产生一定的误差。本文基于冗余联动的六轴联动数控机床加工轨迹误差进行优化的研究,提出了一种改进的轨迹规划算法。实验结果表明,该算法能够有效减少加工轨迹误差,提高加工精度。关键词:冗余联动;六轴联动;数控机床;加工轨迹误差;优化1.引言六轴联动数控机床是目前广泛用于制造业的一种重要设备,在航空航天

基于冗余联动的六轴联动数控机床加工轨迹误差优化.docx
基于冗余联动的六轴联动数控机床加工轨迹误差优化冗余联动的六轴联动数控机床加工轨迹误差优化摘要:六轴联动数控机床作为高精度加工设备,在工业生产过程中具有广泛的应用。然而,由于工件形状复杂和系统误差等原因,加工轨迹误差不可避免地存在。本论文旨在研究如何通过冗余联动的方式来优化六轴联动数控机床的加工轨迹误差。首先,介绍了六轴联动数控机床的基本原理和冗余联动的概念。然后,探讨了加工轨迹误差产生的原因和影响因素。接着,提出了基于冗余联动的加工轨迹误差优化方法,并对其进行了详细的描述和分析。最后,通过实验验证了该方法
连钻连铆式拉铆枪.pdf
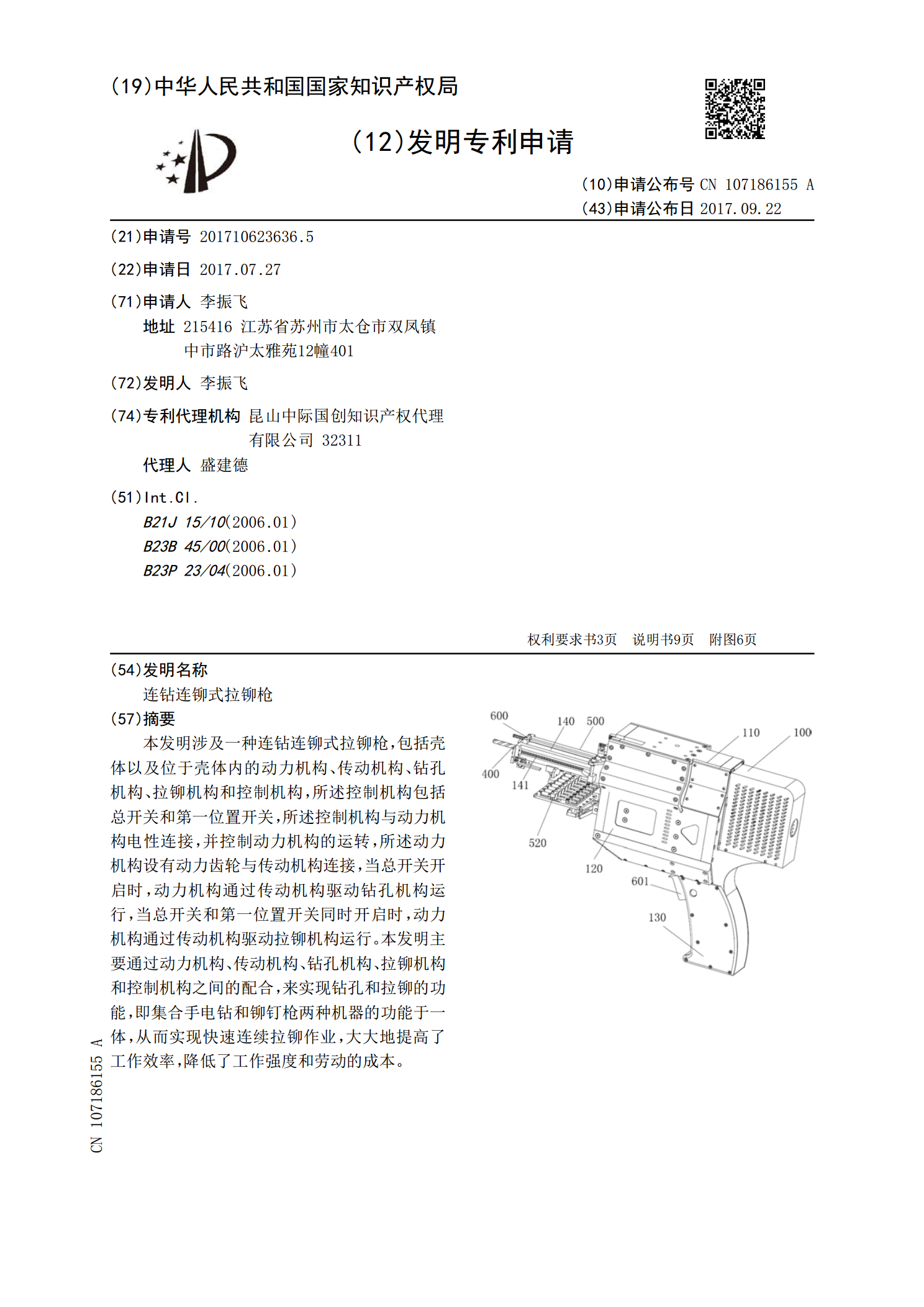
本发明涉及一种连钻连铆式拉铆枪,包括壳体以及位于壳体内的动力机构、传动机构、钻孔机构、拉铆机构和控制机构,所述控制机构包括总开关和第一位置开关,所述控制机构与动力机构电性连接,并控制动力机构的运转,所述动力机构设有动力齿轮与传动机构连接,当总开关开启时,动力机构通过传动机构驱动钻孔机构运行,当总开关和第一位置开关同时开启时,动力机构通过传动机构驱动拉铆机构运行。本发明主要通过动力机构、传动机构、钻孔机构、拉铆机构和控制机构之间的配合,来实现钻孔和拉铆的功能,即集合手电钻和铆钉枪两种机器的功能于一体,从而实

具有冗余自由度的混联自动钻铆机运动学分析.docx
具有冗余自由度的混联自动钻铆机运动学分析摘要:本论文基于混合联合自动钻铆机器人,研究了其运动学分析。通过对机器人的结构和运动方式进行了详细分析和理论推导,得到了机器人的正运动学和逆运动学方程式,并在Matlab软件中进行了数值求解。同时,通过实例验证和仿真分析,证明了该方法的正确性和有效性。最后,对研究结果进行了总结与展望。关键词:混合联合自动钻铆机器人;运动学分析;正逆运动学方程;数值求解;仿真分析引言:混合联合自动钻铆机器人是一种新型的自动化设备,广泛应用于航空航天、汽车制造、机械制造等领域。与传统的