
基于最大熵鲁棒自适应滤波的水下组合导航方法研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于最大熵鲁棒自适应滤波的水下组合导航方法研究的开题报告.docx
基于最大熵鲁棒自适应滤波的水下组合导航方法研究的开题报告一、选题背景水下组合导航是一种对水下目标进行监测、定位、导航等各种操作的技术手段,广泛应用于海洋石油、水上交通、海洋科考等领域。在水下环境中,由于水流、海浪等外界干扰因素导致的噪声会对组合导航系统造成影响,这也是组合导航技术相对于空中和地面导航技术而言更为困难的原因之一。为了提高水下组合导航的准确性和稳定性,必须要对以下几个方面进行研究:基础地形与海洋环境知识、各种传感器的数据融合、基于数字信号处理的滤波技术、自适应控制等综合技术。其中,基于最大熵鲁

鲁棒Kalman滤波及其在水下组合导航中的应用.docx
鲁棒Kalman滤波及其在水下组合导航中的应用鲁棒Kalman滤波及其在水下组合导航中的应用摘要:随着水下探测技术和应用的不断发展,水下组合导航技术成为了水下机器人和水下航行器等水下平台的重要组成部分。鲁棒Kalman滤波是一种适用于非线性系统的滤波方法,可以有效地解决水下组合导航中存在的非线性和噪声干扰等问题。本文首先介绍了Kalman滤波的基本原理和基本算法,然后详细探讨了鲁棒Kalman滤波的基本思想和方法,并将其应用于水下组合导航中。最后,通过实际数据仿真实验,验证了鲁棒Kalman滤波在水下组合
一种基于统计相似度量的组合导航鲁棒滤波方法.pdf
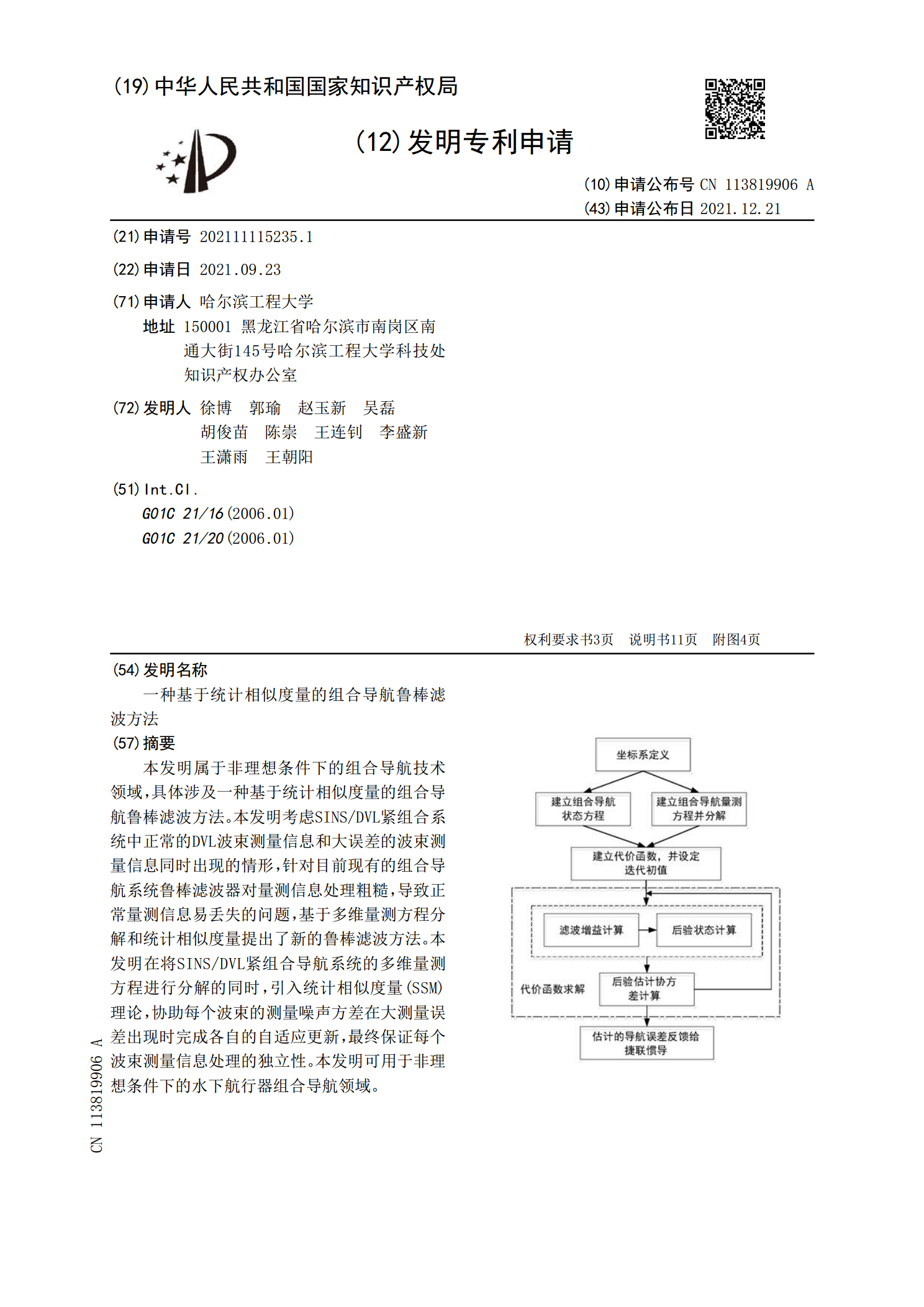
本发明属于非理想条件下的组合导航技术领域,具体涉及一种基于统计相似度量的组合导航鲁棒滤波方法。本发明考虑SINS/DVL紧组合系统中正常的DVL波束测量信息和大误差的波束测量信息同时出现的情形,针对目前现有的组合导航系统鲁棒滤波器对量测信息处理粗糙,导致正常量测信息易丢失的问题,基于多维量测方程分解和统计相似度量提出了新的鲁棒滤波方法。本发明在将SINS/DVL紧组合导航系统的多维量测方程进行分解的同时,引入统计相似度量(SSM)理论,协助每个波束的测量噪声方差在大测量误差出现时完成各自的自适应更新,最终

基于改进Huber-M的组合导航鲁棒滤波算法.docx
基于改进Huber-M的组合导航鲁棒滤波算法基于改进Huber-M的组合导航鲁棒滤波算法摘要:随着导航技术的不断发展,组合导航在各种应用中得到了广泛的应用。然而,由于传感器误差、环境干扰和模型不确定性等因素的存在,组合导航系统容易受到不确定性的影响,导致定位和导航性能下降。为了提高组合导航系统的鲁棒性,本文提出了一种基于改进Huber-M的组合导航鲁棒滤波算法。该算法通过引入自适应权重和鲁棒平均,可以有效地降低误差的影响,提高导航系统的精度和鲁棒性。关键词:组合导航;鲁棒滤波;Huber-M;误差;自适应

基于快速卡尔曼滤波的SAS水下组合导航方法.docx
基于快速卡尔曼滤波的SAS水下组合导航方法摘要水下组合导航是水下探测和定位的一项重要技术,在海洋勘探、水下作业、水下旅游等领域有着广泛的应用。其中,SAS水下组合导航技术是一种独特的组合导航方法,其基于快速卡尔曼滤波算法实现。本文针对快速卡尔曼滤波算法在SAS水下组合导航中的应用进行了研究和分析,探讨了该方法的优缺点和应用前景。关键词:水下组合导航、SAS、快速卡尔曼滤波、优缺点、应用前景引言水下组合导航技术是一种将多种水下定位技术相结合,从而提高定位精度和可靠性的技术。水下组合导航技术已经被广泛应用于海