
基于PID的水下机器人运动控制系统的设计.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于PID的水下机器人运动控制系统的设计.pptx
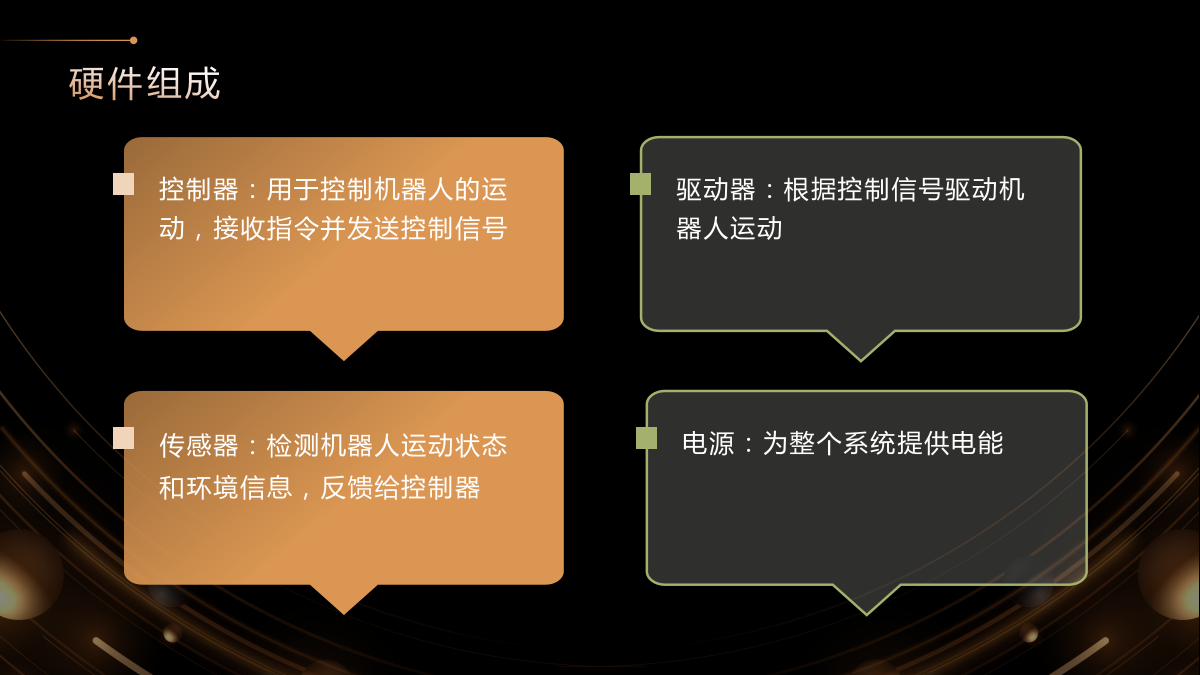
,CONTENTS01.02.比例、积分、微分的作用PID控制算法的数学模型PID控制算法的参数调整03.系统总体结构硬件组成软件设计控制策略04.控制器结构设计控制器参数整定控制器仿真分析05.实验环境搭建实验过程与结果分析实验结论与改进方向06.结论总结未来研究方向感谢您的观看!

基于模糊PID的水下机器人运动控制的中期报告.docx
基于模糊PID的水下机器人运动控制的中期报告一、研究背景和意义水下机器人控制技术是现代海洋工程领域中的重要研究方向之一,其应用广泛,涉及到勘探、资源开发、环境监测等多个领域。在水下机器人的控制中,运动控制是其中极为重要的一个环节,对机器人的运动轨迹、姿态等进行控制,能够保证机器人完成任务并安全返回。因此,对水下机器人运动控制的研究具有重要的现实意义。传统的控制方法主要包括PID控制和模糊控制。PID控制具有简单易懂、易于实现的特点,但却存在较大的局限性,无法适应复杂、非线性系统的控制。模糊控制则可以有效地

基于CANopen协议的水下机器人控制系统设计.docx
基于CANopen协议的水下机器人控制系统设计引言水下机器人(ControlledUnderwaterVehicle)已经成为现代探测技术中不可或缺的一部分,它们在海洋研究、工业检测、水下作业和海底资源勘探等领域中得到广泛应用。随着人类对海洋的探索和海洋资源开发的不断深入,水下机器人的控制系统的性能和可靠性也越来越受关注。CANopen是一种广泛使用的现代通信协议,它可以帮助设计师实现具有高性能和可靠性的水下机器人控制系统。本文将介绍基于CANopen协议的水下机器人控制系统的设计,包括概述CANopen

基于自适应模糊PID运动控制系统的设计.docx
基于自适应模糊PID运动控制系统的设计基于自适应模糊PID运动控制系统的设计摘要:随着工业自动化的发展,运动控制系统在各个领域的应用越来越广泛。传统的PID控制器在一定程度上能够满足运动控制的需求,但在某些复杂的非线性系统中,PID控制器的性能有限。为了提高运动控制系统的性能,本文提出一个基于自适应模糊PID控制器的设计方案。该方案结合了自适应控制、模糊控制和PID控制的优点,能够有效地克服非线性系统的挑战,并在控制精度、响应速度和稳定性方面取得良好的效果。实验结果表明,该自适应模糊PID运动控制系统在不

基于Matlab的模糊PID运动控制系统的设计与仿真.docx
基于Matlab的模糊PID运动控制系统的设计与仿真基于Matlab的模糊PID运动控制系统的设计与仿真摘要:本文介绍了基于Matlab的模糊PID运动控制系统的设计与仿真。首先,介绍了PID控制器的原理和模糊控制的基本概念。然后,详细介绍了模糊PID控制系统的设计流程,包括建立模糊控制器模型、执行模糊规则、调整模糊规则和优化模糊PID控制器参数。最后,通过仿真实验验证了设计的模糊PID控制系统的性能,并对仿真结果进行了分析和讨论。1.引言PID控制器是最常用的工业控制器之一,它的设计和调整相对简单。然而