
基于滑模控制的智能车辆轨迹跟随研究.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于滑模控制的智能车辆轨迹跟随研究.pptx
汇报人:CONTENTSPARTONEPARTTWO滑模控制的基本原理滑模控制的特性滑模控制在智能车辆轨迹跟随中的应用PARTTHREE智能车辆轨迹跟随系统的组成轨迹跟随系统的关键技术滑模控制在轨迹跟随系统中的作用PARTFOUR滑模控制器的设计原则滑模控制算法的实现滑模控制算法的优化PARTFIVE仿真实验平台的搭建实验结果与分析滑模控制在智能车辆轨迹跟随中的性能评估PARTSIX本研究的贡献与局限性未来研究方向与展望汇报人:

基于滑模理论的轨迹跟踪横向控制研究.docx
基于滑模理论的轨迹跟踪横向控制研究摘要本文以滑模理论为基础,研究了轨迹跟踪横向控制。首先,介绍了滑模控制的基本概念和原理,接着,探讨了滑模控制在轨迹跟踪应用中的优势,并对滑模变结构控制理论进行了深入的研究。最后,通过仿真结果验证了本文所提出的方法的有效性。关键词:滑模理论;轨迹跟踪;横向控制;滑模变结构控制一、引言随着自动驾驶技术的发展,轨迹跟踪一直是自动驾驶研究的重点之一。为了使自动驾驶车辆能够沿着给定的轨迹行驶,必须对车辆进行精确的横向控制。目前,常见的横向控制方法有PID控制、模糊控制和滑模控制等。
一种智能车辆轨迹跟随的横纵向协调控制方法.pdf
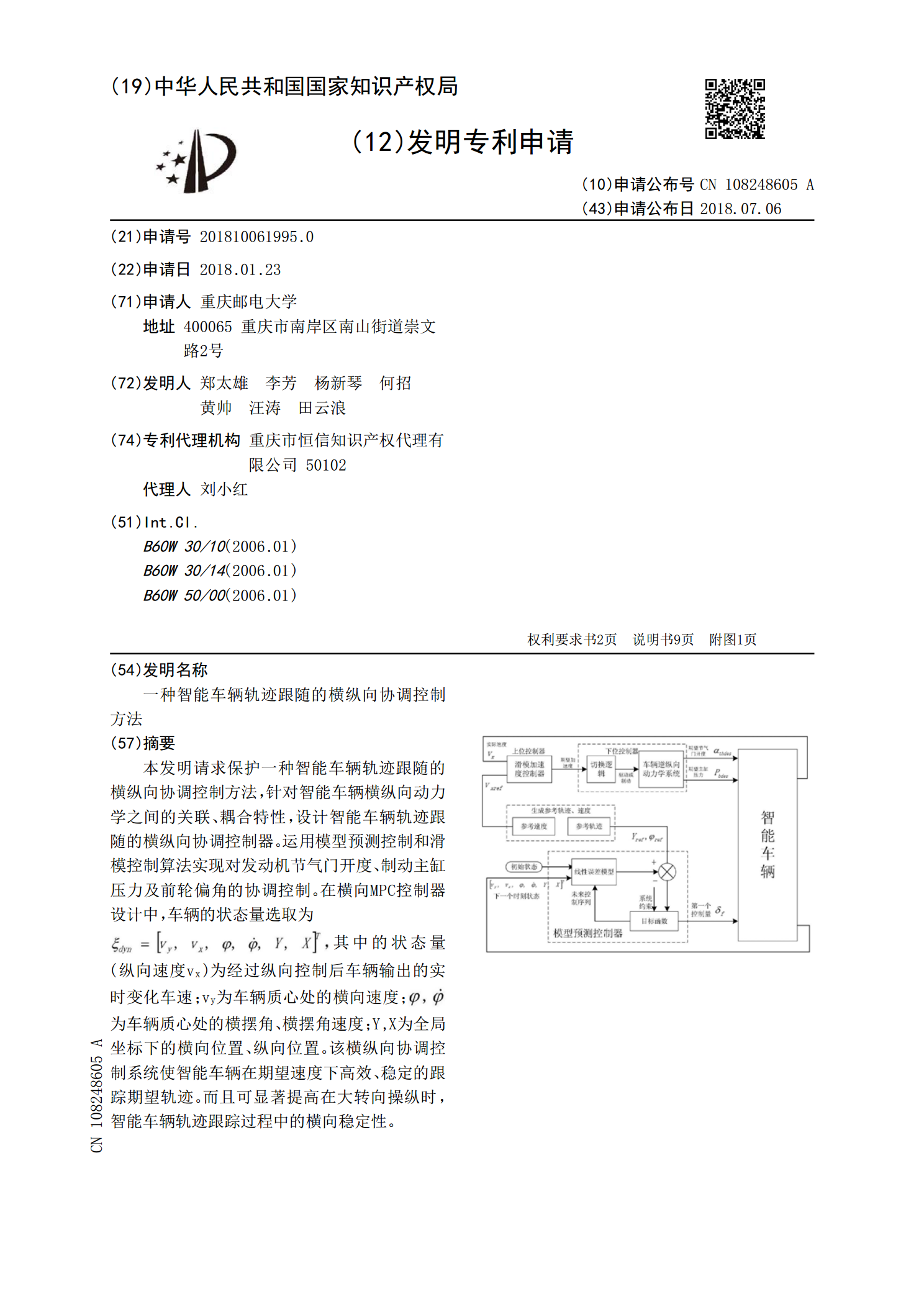
本发明请求保护一种智能车辆轨迹跟随的横纵向协调控制方法,针对智能车辆横纵向动力学之间的关联、耦合特性,设计智能车辆轨迹跟随的横纵向协调控制器。运用模型预测控制和滑模控制算法实现对发动机节气门开度、制动主缸压力及前轮偏角的协调控制。在横向MPC控制器设计中,车辆的状态量选取为

基于卡尔曼控制的滑模振动力输出跟随系统.docx
基于卡尔曼控制的滑模振动力输出跟随系统摘要本文提出了一种基于卡尔曼控制的滑模振动力输出跟随系统,该系统可实现准确的力控制和高精度的跟随能力。首先,制定了系统的控制算法,包括滑模控制和卡尔曼滤波器。然后,基于仿真实验和实际试验,评估了系统的性能和优劣。结果表明,该系统可以稳定地跟随目标力输出,并具有高精度和高灵敏度。本文的研究对于提高力控制的精度和稳定性具有重要的意义。关键词:卡尔曼控制;滑模控制;力控制;跟随系统;振动力引言力控制是机器人和机械系统控制中的重要部分,其主要目标是将力控制在所期望的范围内。然
一种基于滑模神经网络的智能车轨迹跟踪控制方法.pdf
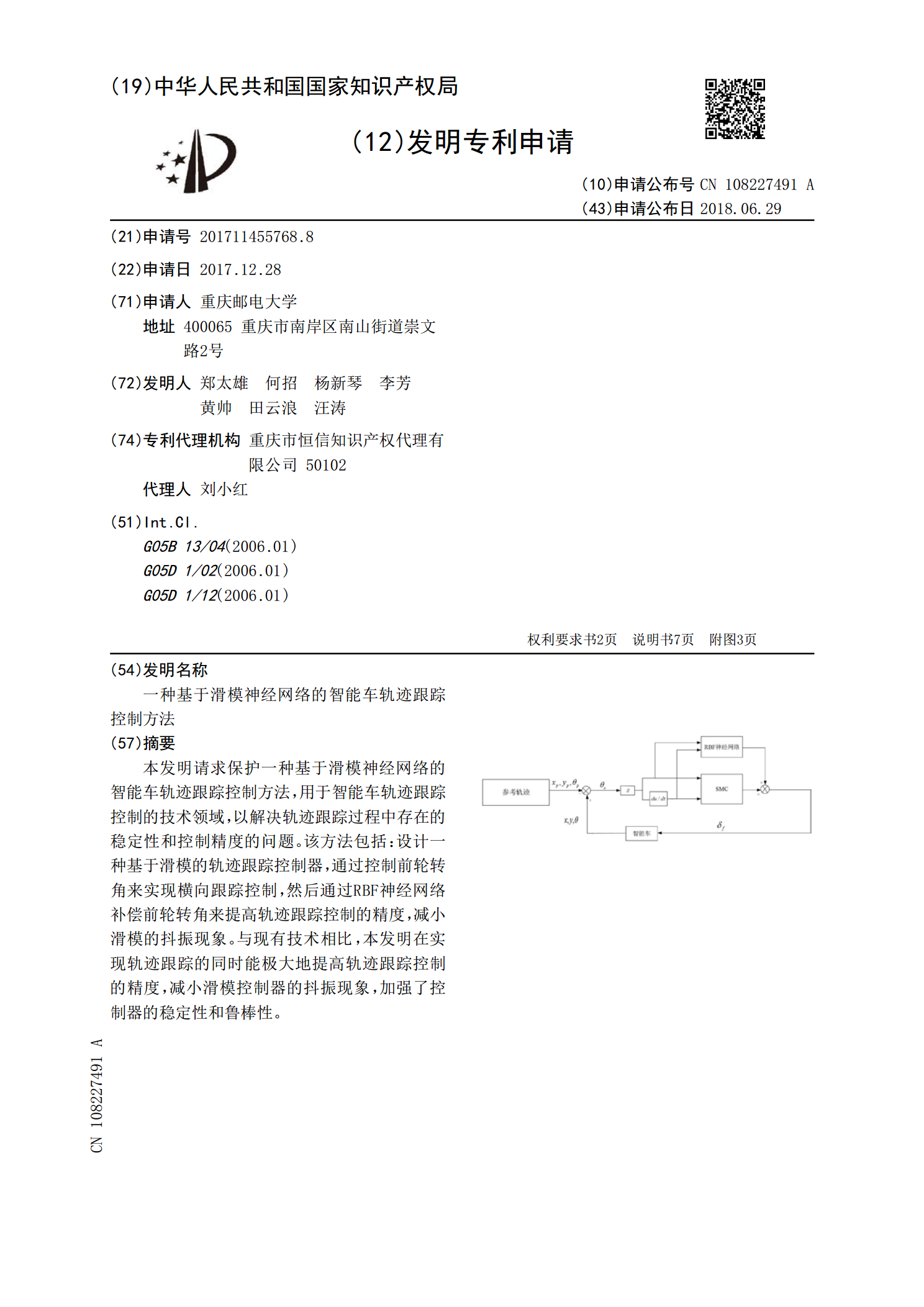
本发明请求保护一种基于滑模神经网络的智能车轨迹跟踪控制方法,用于智能车轨迹跟踪控制的技术领域,以解决轨迹跟踪过程中存在的稳定性和控制精度的问题。该方法包括:设计一种基于滑模的轨迹跟踪控制器,通过控制前轮转角来实现横向跟踪控制,然后通过RBF神经网络补偿前轮转角来提高轨迹跟踪控制的精度,减小滑模的抖振现象。与现有技术相比,本发明在实现轨迹跟踪的同时能极大地提高轨迹跟踪控制的精度,减小滑模控制器的抖振现象,加强了控制器的稳定性和鲁棒性。