
ST-3型飞艇推力矢量的控制的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

ST-3型飞艇推力矢量的控制的任务书.docx
ST-3型飞艇推力矢量的控制的任务书ST-3型飞艇推力矢量控制的任务书一、任务背景ST-3型飞艇是一种多用途无人驾驶航空器,主要用于监测、勘测、救援等任务。在执行任务时,推力矢量控制技术可以实现飞行器高效的机动性能和稳定性能,提高飞行器飞行的灵活性和安全性,增强任务执行能力。二、任务目标本任务的目标是设计和实现ST-3型飞艇的推力矢量控制系统,完成以下任务:1.研究ST-3型飞艇的推力矢量控制技术,了解其原理和应用。2.设计飞艇的推力矢量控制系统,包括硬件和软件。3.实现推力矢量控制系统的控制算法和控制程

ST-3型飞艇推力矢量的控制的开题报告.docx
ST-3型飞艇推力矢量的控制的开题报告开题报告ST-3型飞艇推力矢量的控制一、课题背景及研究意义随着科技的不断发展和空气运输行业的快速发展,飞艇作为一种更加先进新颖的空气运输方式,逐渐受到了广泛的关注。但是,飞艇在进行空中巡逻、搜救、消防等作业时需要适应不同的复杂环境和作业任务,因此需要通过推力矢量控制来完成不同的机动动作。在过去的研究中,飞艇推力矢量的控制主要采用电子液压控制或者电液伺服控制,这种控制方式虽然可以实现较好的控制效果,但是受到限制非常大,只能实现简单的航向调整和俯仰调整。近年来,随着飞艇技

飞艇推力矢量转向系统支架的静动态特性分析.docx
飞艇推力矢量转向系统支架的静动态特性分析飞艇推力矢量转向系统支架的静动态特性分析摘要:飞艇推力矢量转向系统支架是飞艇的重要组成部分,其静态和动态特性对飞艇的稳定性和可操纵性具有重要影响。本论文对飞艇推力矢量转向系统支架的静态特性和动态特性进行了分析,并提出了相应的改进措施。关键词:飞艇推力矢量转向系统、支架、静态特性、动态特性、改进措施一、简介飞艇推力矢量转向系统支架是飞艇的重要组成部分,其主要功能是支撑推力矢量转向系统并将推力传递给空气舵面。支架的静态特性和动态特性对飞艇的稳定性和可操纵性具有重要影响。
矢量推力系统调整飞行俯仰姿态的平流层飞艇.pdf
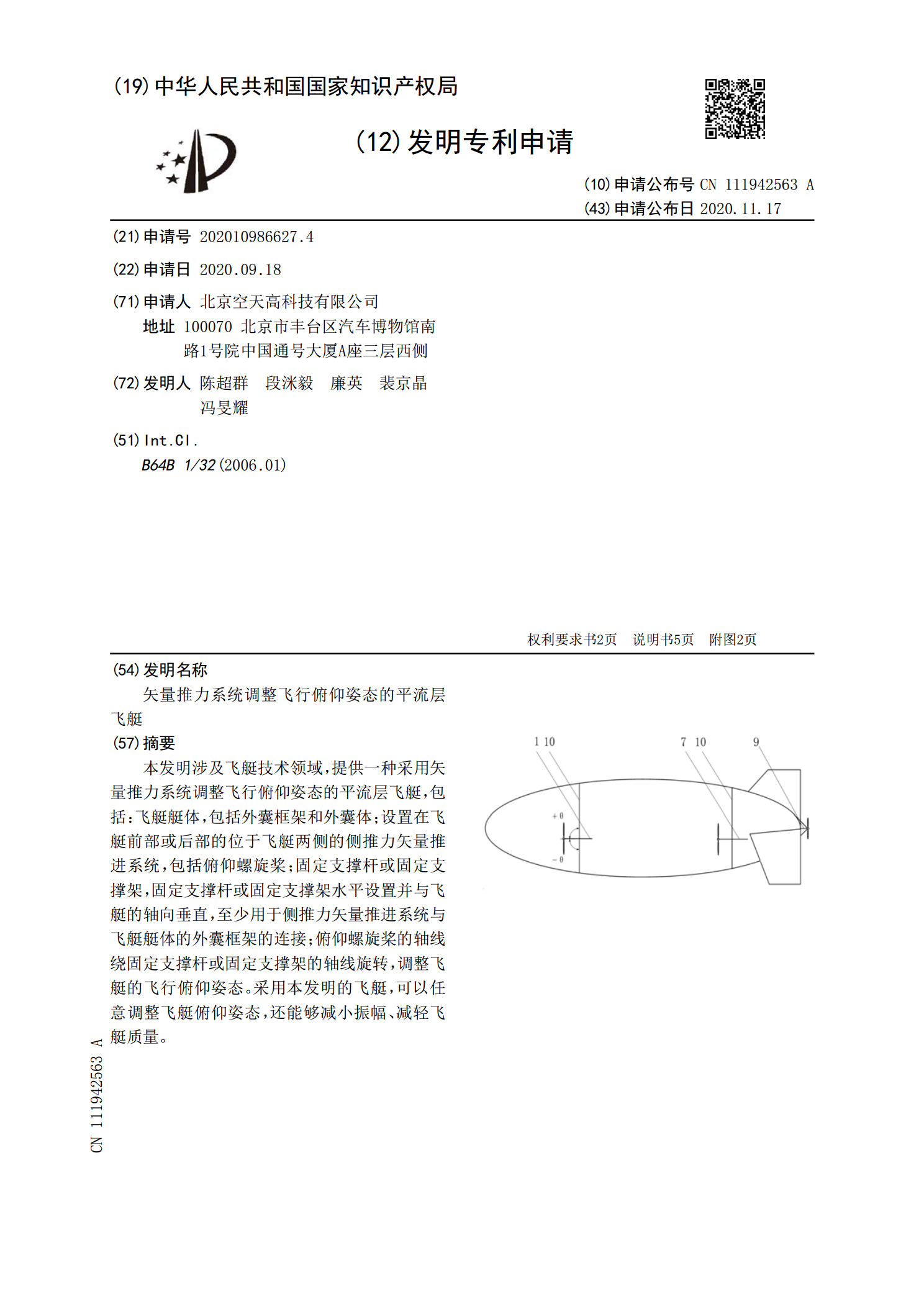
本发明涉及飞艇技术领域,提供一种采用矢量推力系统调整飞行俯仰姿态的平流层飞艇,包括:飞艇艇体,包括外囊框架和外囊体;设置在飞艇前部或后部的位于飞艇两侧的侧推力矢量推进系统,包括俯仰螺旋桨;固定支撑杆或固定支撑架,固定支撑杆或固定支撑架水平设置并与飞艇的轴向垂直,至少用于侧推力矢量推进系统与飞艇艇体的外囊框架的连接;俯仰螺旋桨的轴线绕固定支撑杆或固定支撑架的轴线旋转,调整飞艇的飞行俯仰姿态。采用本发明的飞艇,可以任意调整飞艇俯仰姿态,还能够减小振幅、减轻飞艇质量。

推力矢量控制的方法.docx
推力矢量控制的方法推力矢量控制(TVC)是一种常用的飞行器姿态控制方法,通过改变推力矢量的方向,实现对飞行器的操纵。TVC的应用范围广泛,包括飞行器的姿态控制、飞行轨迹调整以及飞行器的稳定性提升等。在本文中,将介绍TVC的基本原理、控制策略和应用领域,并以航空航天领域为例,探讨TVC在升空器和火箭的姿态控制中的应用。首先,我们来介绍TVC的基本原理。TVC的核心思想是通过改变发动机喷口的方向,调整推力矢量的方向,从而改变飞行器的姿态。一般来说,TVC系统由推力矢量控制装置、控制系统和传感器组成。推力矢量控