
基于肌电的手部康复机器人智能交互技术研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于肌电的手部康复机器人智能交互技术研究的开题报告.docx
基于肌电的手部康复机器人智能交互技术研究的开题报告一、选题背景及意义肢体功能障碍是人类最常见的疾病之一,尤其是手部的功能障碍,会直接影响人们的日常生活。传统的康复方法依赖于手动操作和物理治疗,存在时间长、效果明显、动力柔性不足等问题。因此,智能手部康复机器人的出现给康复行业带来了一线生机。随着生物传感器技术的快速发展,肌电信号成为一种重要的生物信号。肌电信号的测量与处理可以帮助我们了解肌肉的运动状态和激发肌肉收缩的动作方式。利用肌电信号来控制机器人康复设备可以提高机器人康复设备的智能交互和康复效果提高。因

基于肌电的手部康复机器人智能交互技术研究.docx
基于肌电的手部康复机器人智能交互技术研究摘要:手部康复机器人在康复过程中起到举足轻重的作用,对于重建手部功能有着重要的帮助。然而,现有的手部康复机器人在智能交互方面仍存在一些挑战。本文基于肌电信号的手部康复机器人智能交互技术进行了研究。首先,介绍了手部康复机器人的发展及其重要性。然后,重点探讨了肌电信号的获取和处理方法,并介绍了智能交互技术的基本原理。接着,介绍了基于肌电信号的手部康复机器人智能交互技术的研究进展,并对其存在的问题进行了分析。最后,提出了未来的发展方向和研究重点。关键词:手部康复机器人,肌

基于sEMG的手部康复机器人交互控制研究的开题报告.docx
基于sEMG的手部康复机器人交互控制研究的开题报告一、研究背景及意义随着人口老龄化的加剧和手部功能障碍人群的不断增加,手部康复逐渐成为了一个重要的研究领域。目前,手部康复主要依赖于物理治疗师的手工康复技术和康复设备的辅助作用。但是传统的手工康复技术对治疗师的技能和经验要求较高,且存在着操作难度大、治疗效果不尽如人意等问题。而目前市面上大部分的康复设备存在着运动控制精度不高、互动性差等问题。随着生物医学工程技术的发展,利用肌电信号(sEMG)操控康复机器人,是当前应用广泛的一种手部康复模式。肌电信号是人体肌

基于表面肌电的手部运动康复与量化评估技术研究的任务书.docx
基于表面肌电的手部运动康复与量化评估技术研究的任务书任务书一、项目背景随着现代社会的快速发展,手部运动在人类的日常生活中起着重要的作用。然而,由于各种因素的影响,如创伤、疾病等,手部的运动能力可能会受到影响。因此,如何对手部运动进行康复和评估,发挥手部运动的潜力,提高生活质量和生产力,已经成为一个热门的研究领域。目前,基于表面肌电的手部运动康复技术已经被广泛应用。不仅可以通过肌电信号控制假肢并进行康复,还可以通过对肌电信号的量化评估来了解肌肉的运动能力和疲劳程度。然而,在当前的研究中,对于如何准确、快速、
一种基于肌电智能穿戴的交互式康复系统.pdf
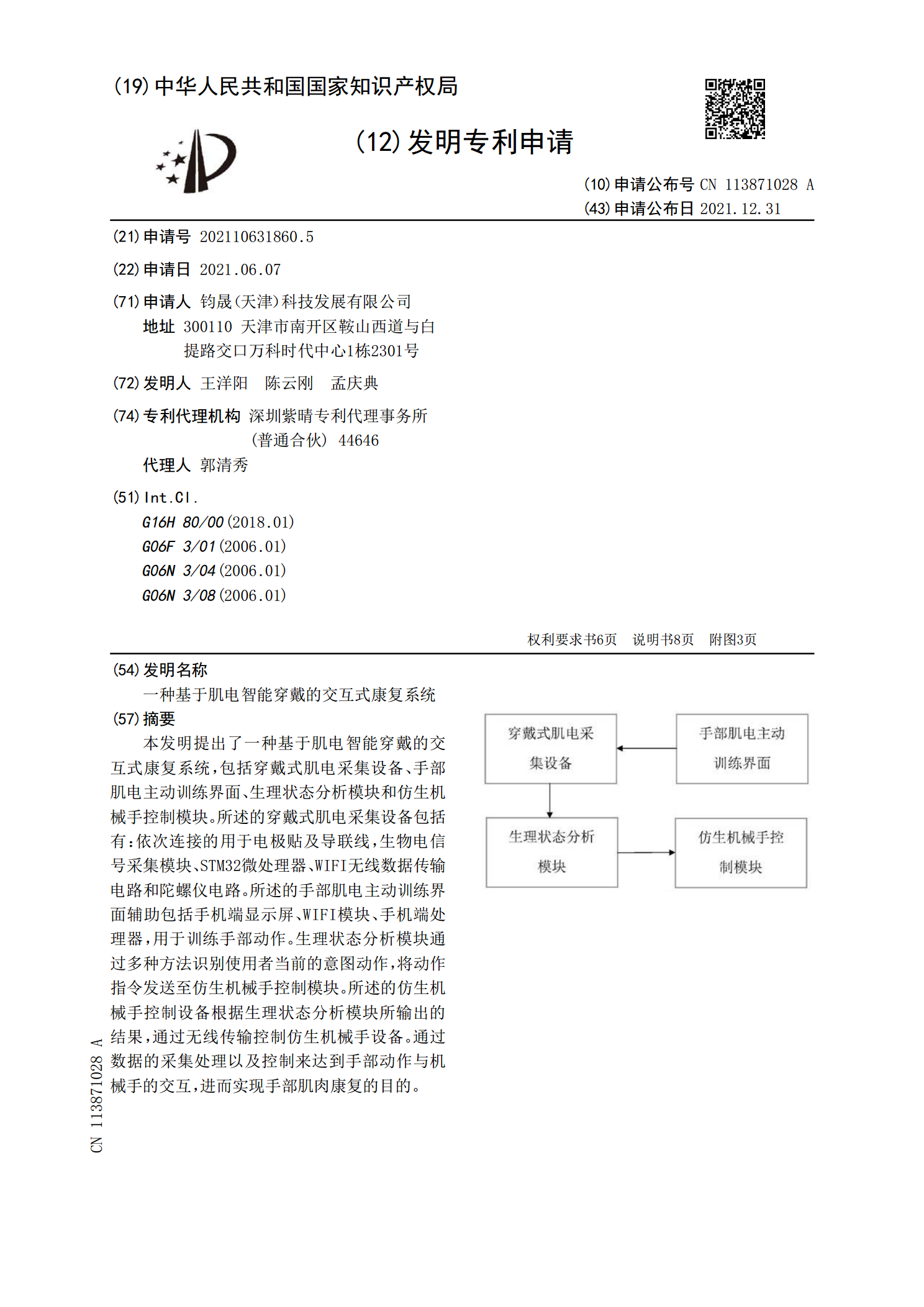
本发明提出了一种基于肌电智能穿戴的交互式康复系统,包括穿戴式肌电采集设备、手部肌电主动训练界面、生理状态分析模块和仿生机械手控制模块。所述的穿戴式肌电采集设备包括有:依次连接的用于电极贴及导联线,生物电信号采集模块、STM32微处理器、WIFI无线数据传输电路和陀螺仪电路。所述的手部肌电主动训练界面辅助包括手机端显示屏、WIFI模块、手机端处理器,用于训练手部动作。生理状态分析模块通过多种方法识别使用者当前的意图动作,将动作指令发送至仿生机械手控制模块。所述的仿生机械手控制设备根据生理状态分析模块所输出的