
基于多传感器数据融合的姿态估计与位置解算方法.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多传感器数据融合的姿态估计与位置解算方法.pptx
添加副标题目录PART01PART02数据融合的定义与重要性多传感器数据融合的原理与技术姿态估计与位置解算的意义PART03姿态估计的基本概念常用姿态估计方法介绍基于多传感器数据融合的姿态估计方法原理姿态估计方法的优缺点分析PART04位置解算的基本概念常用位置解算方法介绍基于多传感器数据融合的位置解算方法原理位置解算方法的优缺点分析PART05无人机定位与导航机器人定位与导航智能交通系统虚拟现实与增强现实技术其他应用场景PART06面临的挑战技术发展趋势与展望未来研究方向与展望感谢您的观看
一种基于多传感器融合和姿态解算的自由姿态PDR定位方法.pdf
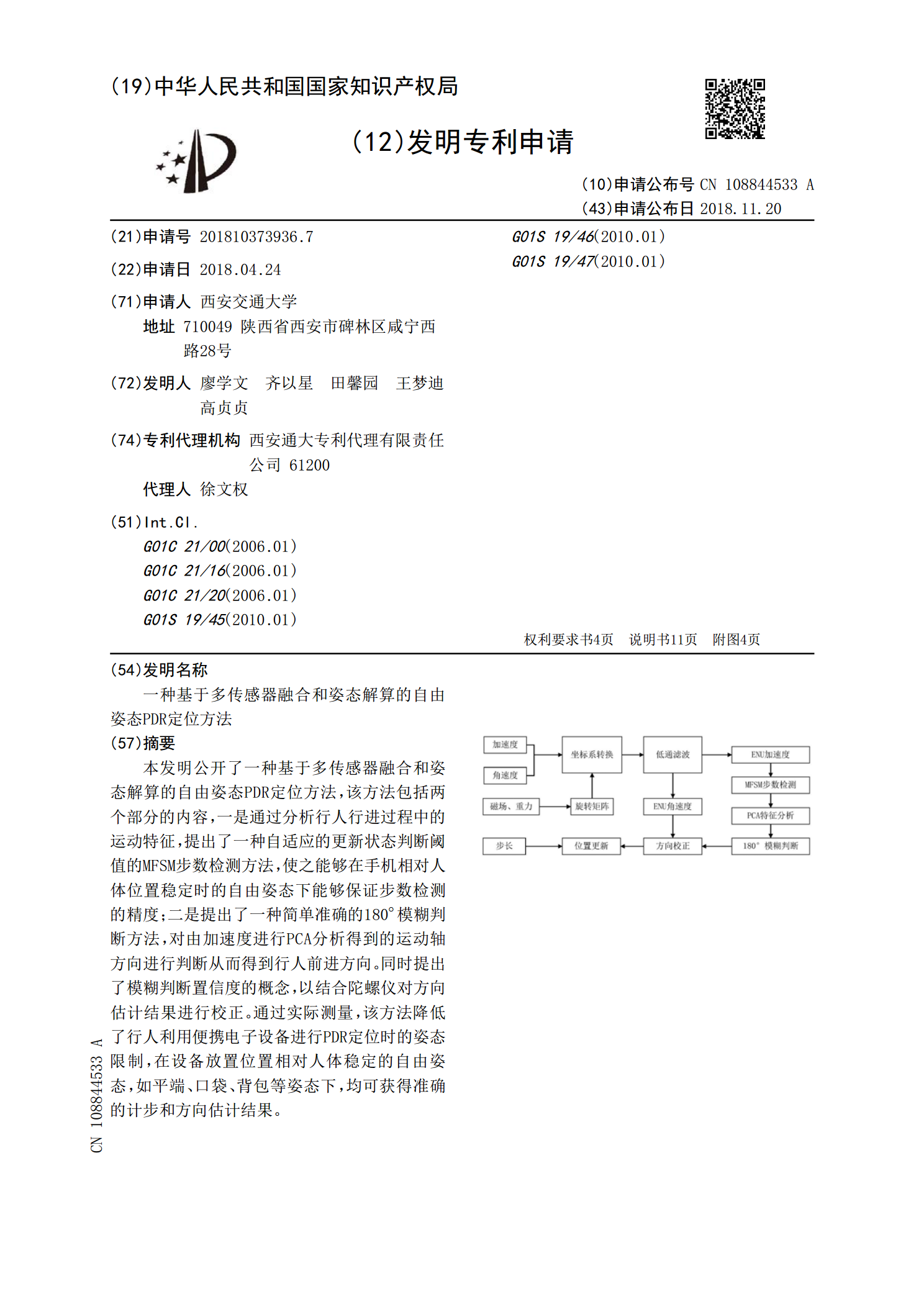
本发明公开了一种基于多传感器融合和姿态解算的自由姿态PDR定位方法,该方法包括两个部分的内容,一是通过分析行人行进过程中的运动特征,提出了一种自适应的更新状态判断阈值的MFSM步数检测方法,使之能够在手机相对人体位置稳定时的自由姿态下能够保证步数检测的精度;二是提出了一种简单准确的180°模糊判断方法,对由加速度进行PCA分析得到的运动轴方向进行判断从而得到行人前进方向。同时提出了模糊判断置信度的概念,以结合陀螺仪对方向估计结果进行校正。通过实际测量,该方法降低了行人利用便携电子设备进行PDR定位时的姿态

基于MARG传感器的头部姿态解算方法研究.pptx
添加副标题目录PART01PART02MARG传感器的原理MARG传感器的应用场景MARG传感器的发展趋势PART03头部姿态解算的意义头部姿态解算的方法分类头部姿态解算的应用前景PART04基于MARG传感器的头部姿态解算原理基于MARG传感器的头部姿态解算算法基于MARG传感器的头部姿态解算实验验证基于MARG传感器的头部姿态解算的优势与局限性PART05算法优化与改进实验验证的完善与拓展实际应用中的问题与解决方案未来研究展望PART06在人机交互领域的应用前景在虚拟现实领域的应用前景在智能机器人领域

基于地磁传感器解算旋转体姿态的方法.docx
基于地磁传感器解算旋转体姿态的方法基于地磁传感器解算旋转体姿态的方法摘要:地磁传感器是一种常用的传感器,广泛应用于姿态解算、导航和定位等领域。为了实现准确可靠的姿态解算,本文对基于地磁传感器解算旋转体姿态的方法进行了研究和探讨。首先,介绍了地磁传感器的原理和特性,然后讨论了地磁传感器存在的问题以及解决方法,并提出了一种基于地磁传感器的姿态解算算法。最后,通过实验验证了算法的有效性和稳定性。关键词:地磁传感器;姿态解算;旋转体;算法;实验1.引言地磁传感器是一种测量地球磁场强度和方向的传感器,可以用来实现姿

基于线性经验Bayes估计的位置数据融合方法.docx
基于线性经验Bayes估计的位置数据融合方法基于线性经验Bayes估计的位置数据融合方法摘要:随着定位技术的不断发展,位置数据的精确性和可靠性成为越来越重要的要素。位置数据融合是一种将不同传感器或技术所得到的位置数据进行整合和优化的方法,可以提供更加准确和可信赖的位置估计。本文提出了一种基于线性经验Bayes估计的位置数据融合方法,该方法通过对不同传感器数据的权重进行动态调整,实现了更准确的位置估计。实验证明了该方法在不同环境和条件下都可以取得较好的定位精度。关键词:位置数据融合;线性经验Bayes估计;