
机器人机械参数辨识与误差补偿方法.pptx

快乐****蜜蜂

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人机械参数辨识与误差补偿方法.pptx
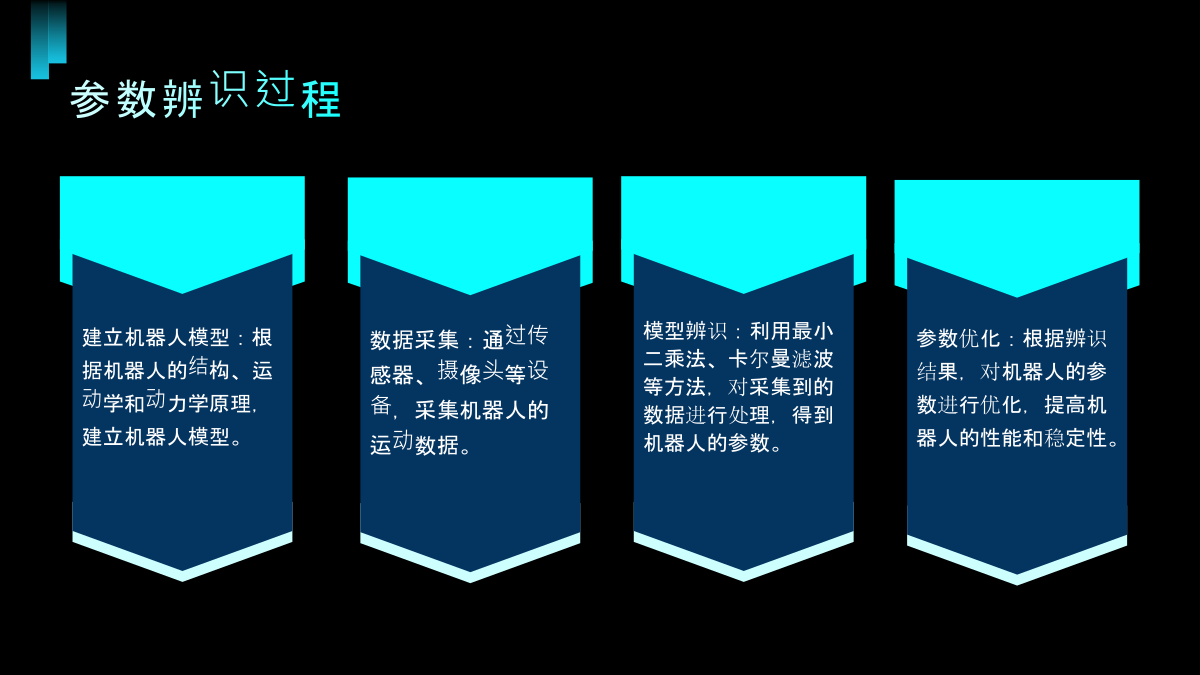
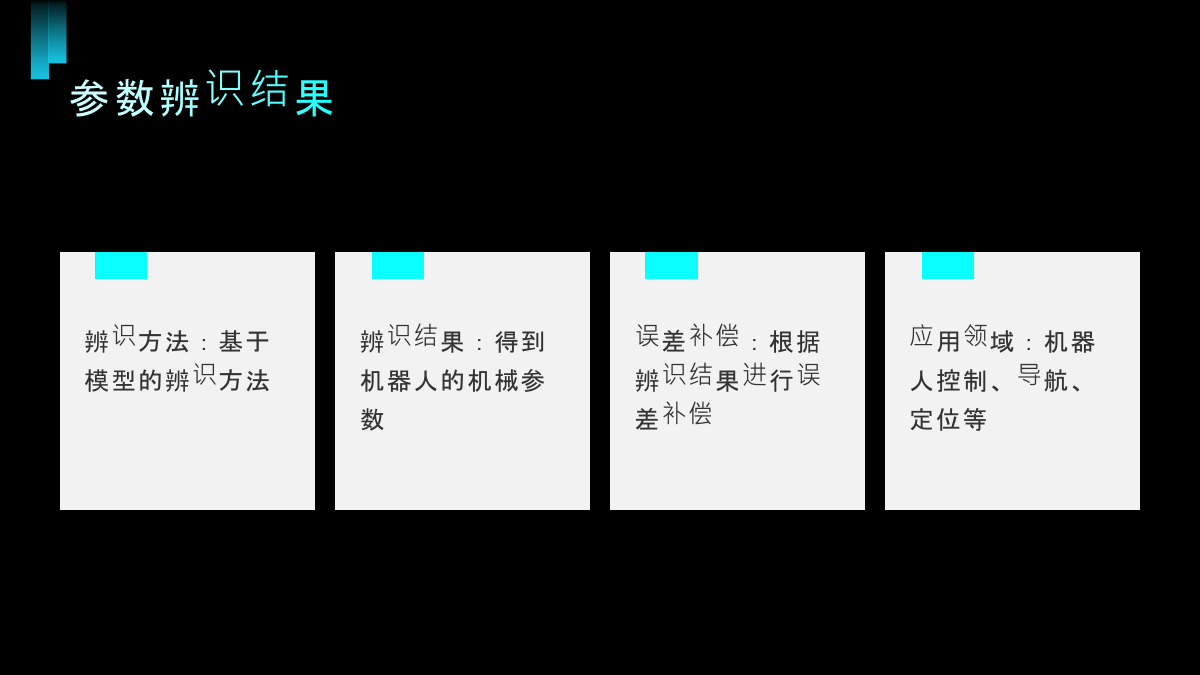
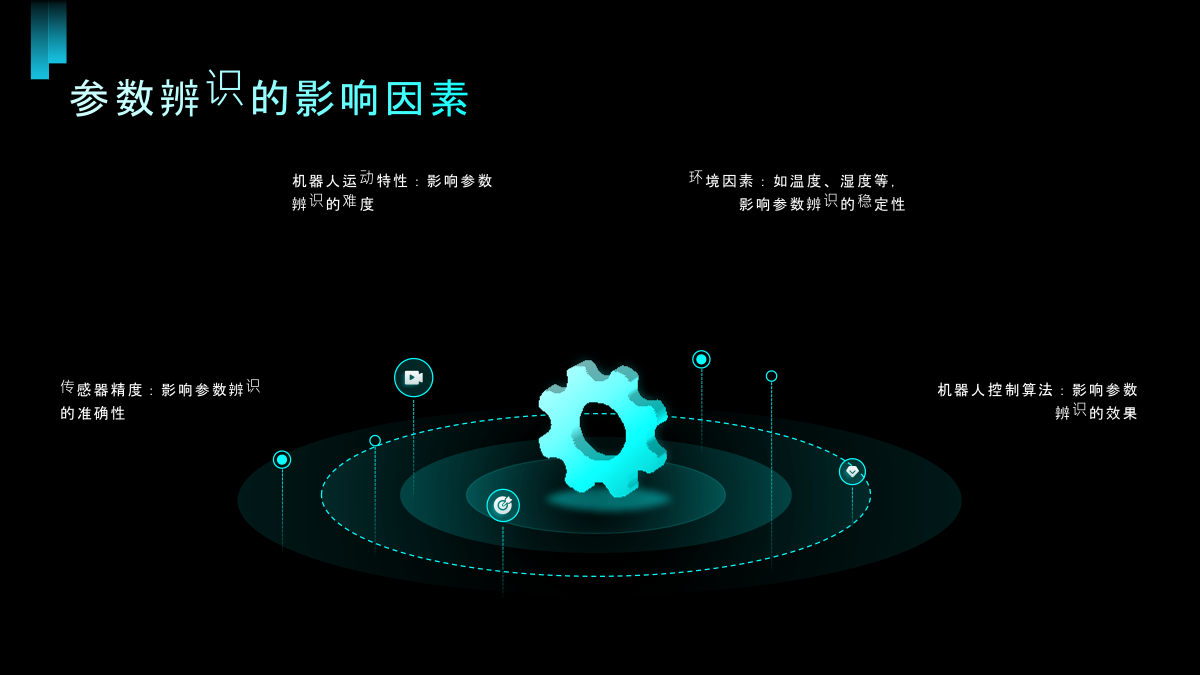
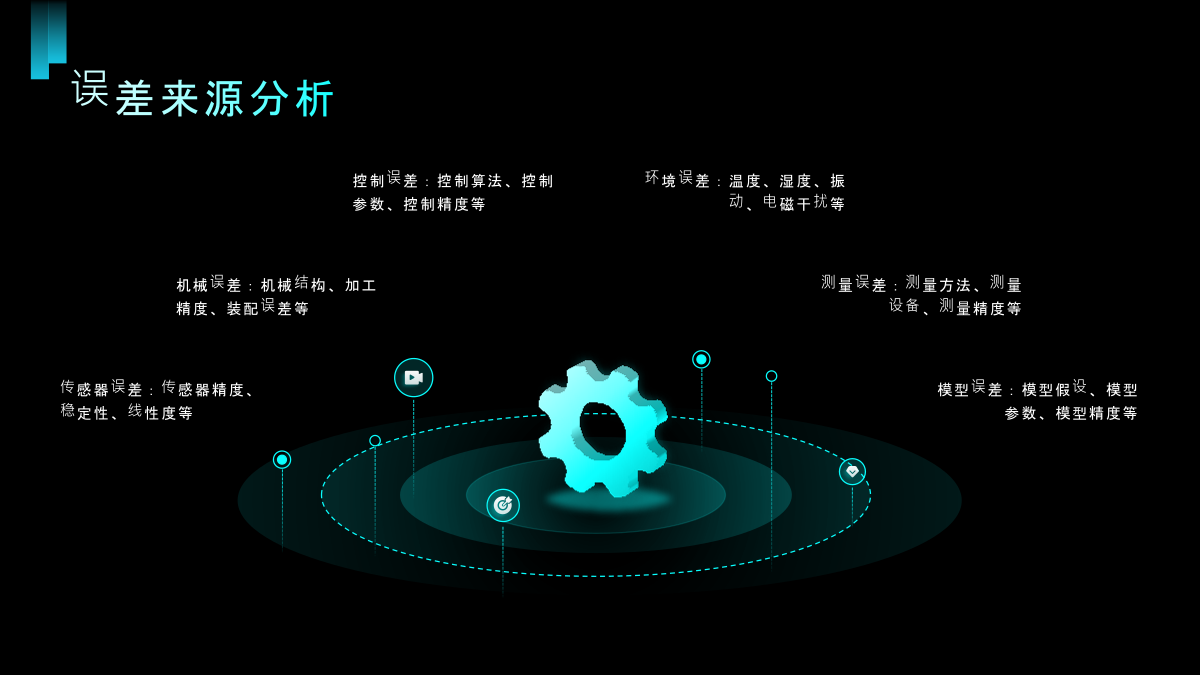
汇报人:目录PARTONEPARTTWO参数辨识方法参数辨识过程参数辨识结果参数辨识的影响因素PARTTHREE误差来源分析误差补偿方法分类误差补偿实施过程误差补偿效果评估PARTFOUR参数辨识对误差补偿的影响误差补偿对参数辨识的反馈作用参数辨识与误差补偿的协同作用参数辨识与误差补偿的实践意义PARTFIVE技术发展趋势研究热点问题未来发展方向技术应用前景THANKYOU

工业机器人参数辨识及误差补偿方法研究.docx
工业机器人参数辨识及误差补偿方法研究随着制造业业务的不断扩展和生产制造工艺的不断升级,工业机器人在制造业领域中的应用越来越广泛。然而,在实际的工作中,由于各种因素的影响,工业机器人的精度和性能可能会出现误差,给产品的制造质量和企业的生产效率造成影响。本文将介绍工业机器人参数辨识及误差补偿方法的研究。一、工业机器人参数辨识工业机器人的参数是指机器人的运动控制参数、机械结构参数以及传感器参数等多个参数。在实际的工作中,由于各种因素的缘故,这些参数可能会出现误差,从而影响机器人的性能和精度。因此,对这些参数进行

基于电流测量误差补偿的感应电机参数辨识.docx
基于电流测量误差补偿的感应电机参数辨识标题:基于电流测量误差补偿的感应电机参数辨识摘要:感应电机作为一种重要的电动机,广泛应用于工业领域,其参数辨识对于电机的控制和故障诊断具有重要意义。然而,由于电流测量不可避免地存在误差,会对参数辨识结果产生影响。本文提出了一种基于电流测量误差补偿的感应电机参数辨识方法,通过对电流测量误差进行补偿,提高了参数辨识的精度和可靠性。关键词:感应电机、参数辨识、电流测量误差、补偿1.引言感应电机是一种常用的电动机,广泛应用于各个工业领域。准确的感应电机参数是实现电机控制和故障
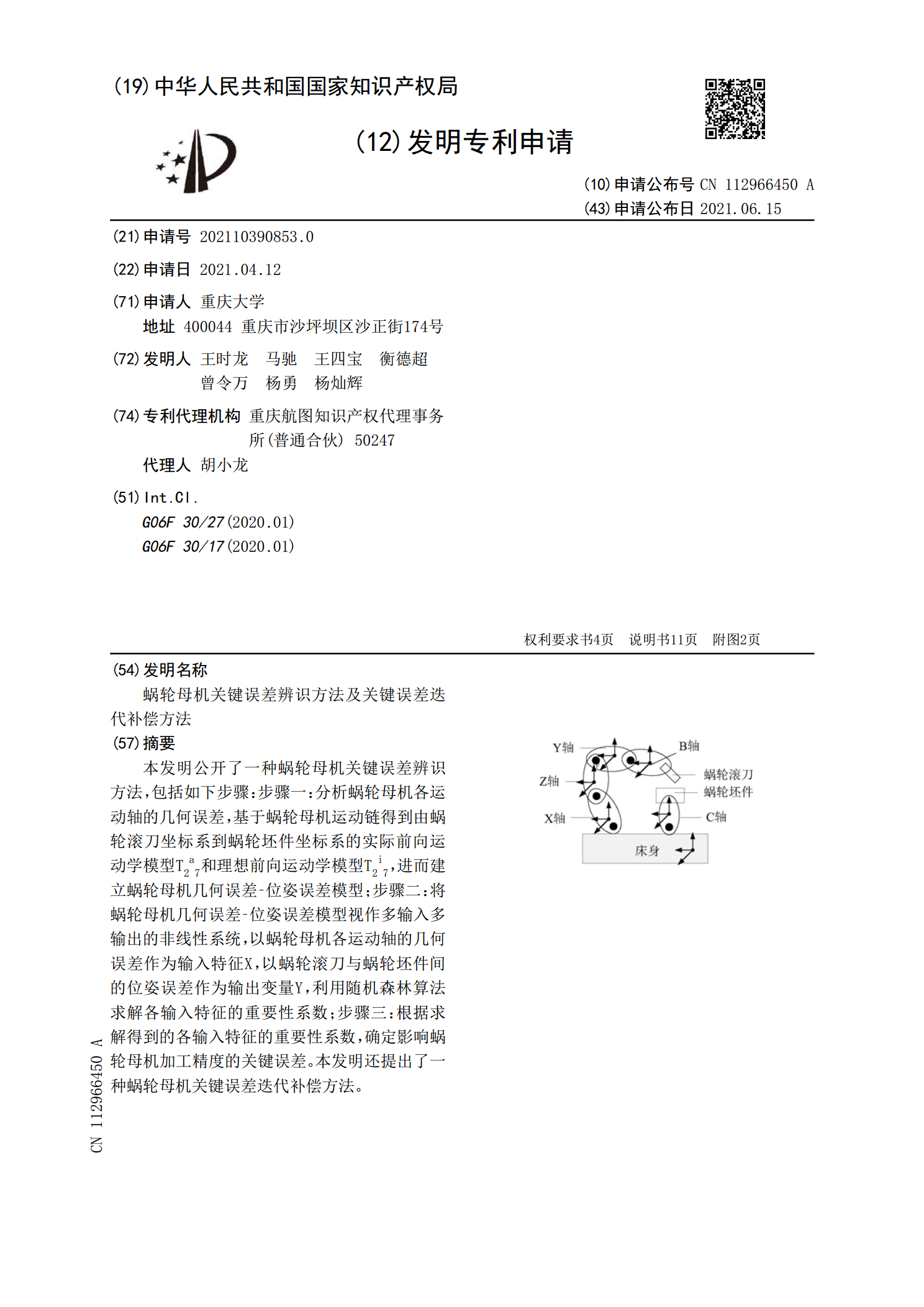
蜗轮母机关键误差辨识方法及关键误差迭代补偿方法.pdf
本发明公开了一种蜗轮母机关键误差辨识方法,包括如下步骤:步骤一:分析蜗轮母机各运动轴的几何误差,基于蜗轮母机运动链得到由蜗轮滚刀坐标系到蜗轮坯件坐标系的实际前向运动学模型T

基于距离误差的机器人参数辨识模型与冗余性分析.docx
基于距离误差的机器人参数辨识模型与冗余性分析基于距离误差的机器人参数辨识模型与冗余性分析摘要:机器人参数辨识是机器人控制领域的关键技术之一。本文提出了一种基于距离误差的机器人参数辨识模型,并对其进行了冗余性分析。分析结果表明,该模型能够有效地辨识机器人的不确定参数,并具有较好的冗余性能。该研究对于机器人控制算法的优化和提升具有重要的理论和实践意义。关键词:机器人;参数辨识;距离误差;冗余性分析1.引言随着机器人技术的不断发展,机器人已广泛应用于工业制造、农业生产、医疗护理等领域。在机器人控制中,准确获得机