
主从式AUV协同定位算法研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主从式AUV协同定位算法研究的开题报告.docx
主从式AUV协同定位算法研究的开题报告一、选题背景随着人类对海洋问题的关注度越来越高,自主水下机器人技术也逐渐成熟。自主水下机器人是指在水下环境下,能够自主移动和执行任务的机器人。其中,自主水下机器人中的AUV(AutonomousUnderwaterVehicle)具有自主决策、控制、执行任务等能力,可以应用于海洋资源调查、水下探测、环境监测等领域。在AUV中,定位算法是其核心技术之一。定位算法能够帮助AUV在海洋环境中精确的获取自身位置和姿态信息,是能否完成任务的关键因素之一。目前主流的AUV定位算法

主从式AUV协同定位算法研究.docx
主从式AUV协同定位算法研究主从式AUV协同定位算法研究摘要:主从式AUV协同定位是一种通过相互协作完成自身定位任务的方法。本文介绍了主从式AUV协同定位的概念和基本原理,并详细探讨了目前常用的三种主从式AUV协同定位算法,包括基于距离测量的算法、基于特征匹配的算法和基于无线信号的算法。通过比较实验和仿真结果,分析了各种算法的优缺点和适用场景。最后,展望了主从式AUV协同定位的未来发展方向。关键词:主从式AUV协同定位、距离测量、特征匹配、无线信号、优缺点、未来发展1.引言随着技术的进步和应用的广泛,自主

AUV长基线定位算法研究的开题报告.docx
AUV长基线定位算法研究的开题报告开题报告一、选题背景及意义自主水下机器人(AUV)由于其操作无需人力介入,可以用于战争、科考等多种需要高效水下作业的场合,而定位技术是AUV进行水下作业的核心。由于水下环境的复杂性和无法与水下机器人进行通信等问题,传统的GPS定位技术难以在水下环境中实现。因此,长基线定位技术成为AUV水下定位的重要手段之一。本研究旨在深入了解AUV长基线定位技术的原理以及优化算法,实现对AUV的精确定位。二、研究内容及方法1.AUV长基线定位技术原理AUV长基线定位技术是采用多个声源(或
考虑洋流影响的基于因子图的主从式AUV协同定位方法.pdf
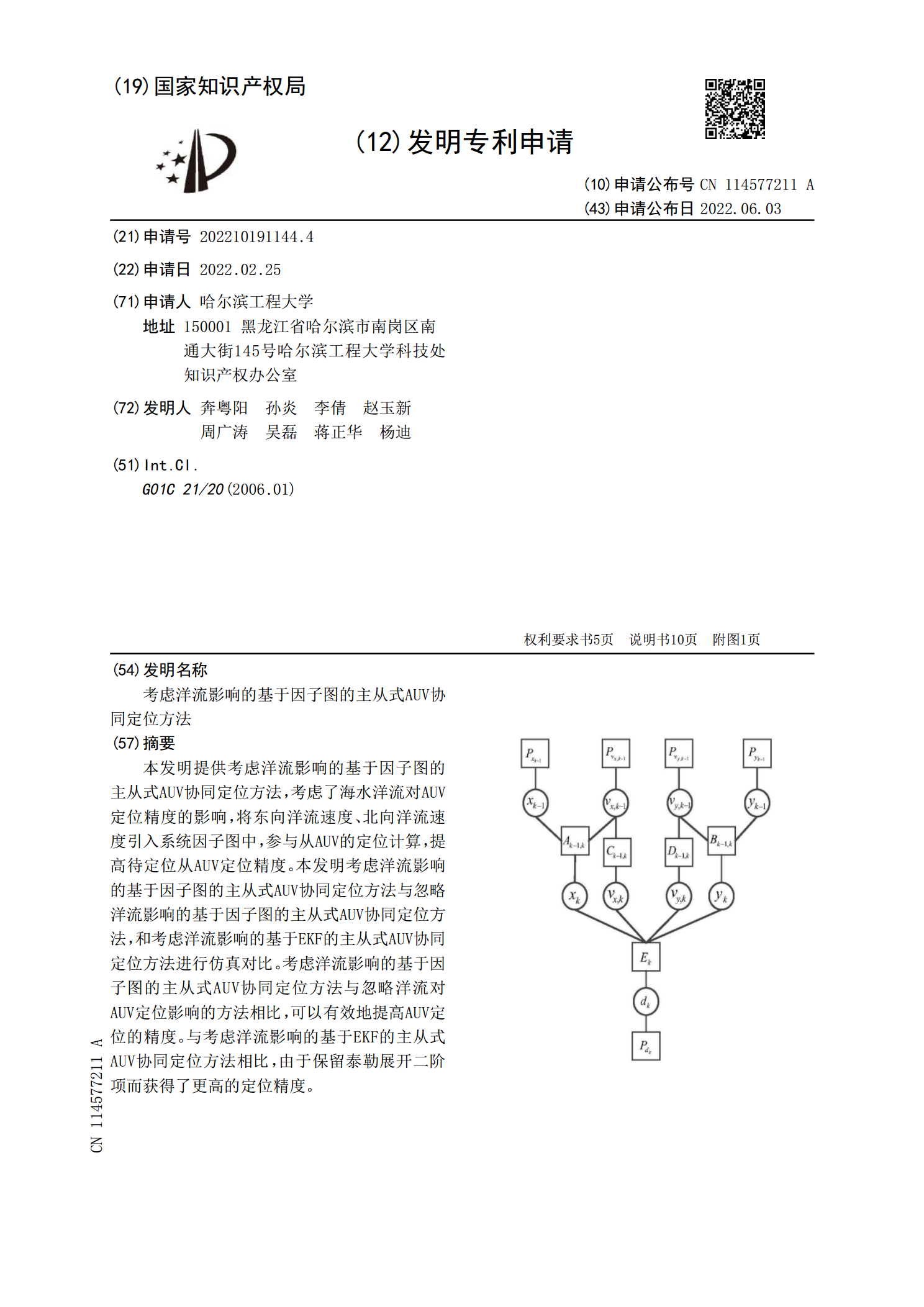
本发明提供考虑洋流影响的基于因子图的主从式AUV协同定位方法,考虑了海水洋流对AUV定位精度的影响,将东向洋流速度、北向洋流速度引入系统因子图中,参与从AUV的定位计算,提高待定位从AUV定位精度。本发明考虑洋流影响的基于因子图的主从式AUV协同定位方法与忽略洋流影响的基于因子图的主从式AUV协同定位方法,和考虑洋流影响的基于EKF的主从式AUV协同定位方法进行仿真对比。考虑洋流影响的基于因子图的主从式AUV协同定位方法与忽略洋流对AUV定位影响的方法相比,可以有效地提高AUV定位的精度。与考虑洋流影响的

水下多AUV协同定位方法研究的开题报告.docx
水下多AUV协同定位方法研究的开题报告一、选题背景随着水下技术的不断发展,水下机器人已经成为了水下作业和勘探的重要工具。而在多台水下机器人同时执行任务的时候,需要进行定位,才能更好地实现协同作业。因此,水下多AUV协同定位方法的研究,具有非常重要的现实意义和科学价值。二、研究意义1.提高水下机器人协作效率在水下多AUV协同作业时,各个机器人的位置信息需要及时传递和共享,才能实现有效的协调和协作。研究水下多AUV协同定位方法,可以更好地实现信息共享,提高多台机器人之间的协作效率,进而提高水下作业的效率。2.