
基于视觉和惯性传感器的移动机器人自定位研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉和惯性传感器的移动机器人自定位研究的任务书.docx
基于视觉和惯性传感器的移动机器人自定位研究的任务书任务书一、研究背景移动机器人是一种自主运动的智能机器人,可以在各种环境中进行结构、运动、任务的自主规划和执行,其应用已经渗透到很多行业。然而,移动机器人的定位是其自主行动的基础。基于视觉和惯性传感器的移动机器人自定位(SLAM)技术是当前最常用的技术,具有较高准确性和实时性。因此,在移动机器人研究领域,基于视觉和惯性传感器的自定位研究具有重要的意义和应用价值。二、研究内容1.汇总了国内外基于视觉和惯性传感器的自定位技术,分析其优缺点和适用范围。2.研究基于

基于视觉和惯性传感器的移动机器人自定位研究.docx
基于视觉和惯性传感器的移动机器人自定位研究基于视觉和惯性传感器的移动机器人自定位研究摘要:移动机器人自定位是移动机器人领域的核心问题之一,对于机器人在未知环境中进行导航和任务执行具有重要意义。本文基于视觉和惯性传感器,对移动机器人的自定位进行了深入研究。首先介绍了视觉和惯性传感器的原理以及在自定位中的作用,然后介绍了常见的自定位算法,包括基于特征点匹配的方法、基于滤波器的方法和基于优化的方法。最后,通过实验验证了所提出算法的有效性和可行性。关键词:移动机器人、自定位、视觉传感器、惯性传感器、特征点匹配、滤

基于惯性传感器和视觉传感器的室内定位研究.docx
基于惯性传感器和视觉传感器的室内定位研究基于惯性传感器和视觉传感器的室内定位研究摘要:室内定位在许多应用领域中都起着重要的作用,如智能家居、室内导航等。本文研究了基于惯性传感器和视觉传感器的室内定位方法。首先介绍了惯性传感器和视觉传感器的基本原理和特点,然后提出了一种基于融合惯性传感器和视觉传感器数据的室内定位算法。实验结果表明,该算法能够实现较高的定位精度。最后,讨论了该算法的局限性和未来研究方向。关键词:室内定位;惯性传感器;视觉传感器;融合1.引言随着智能设备的普及和应用场景的不断增加,室内定位技术
基于ROS的惯性导航和视觉信息融合的移动机器人定位研究.docx
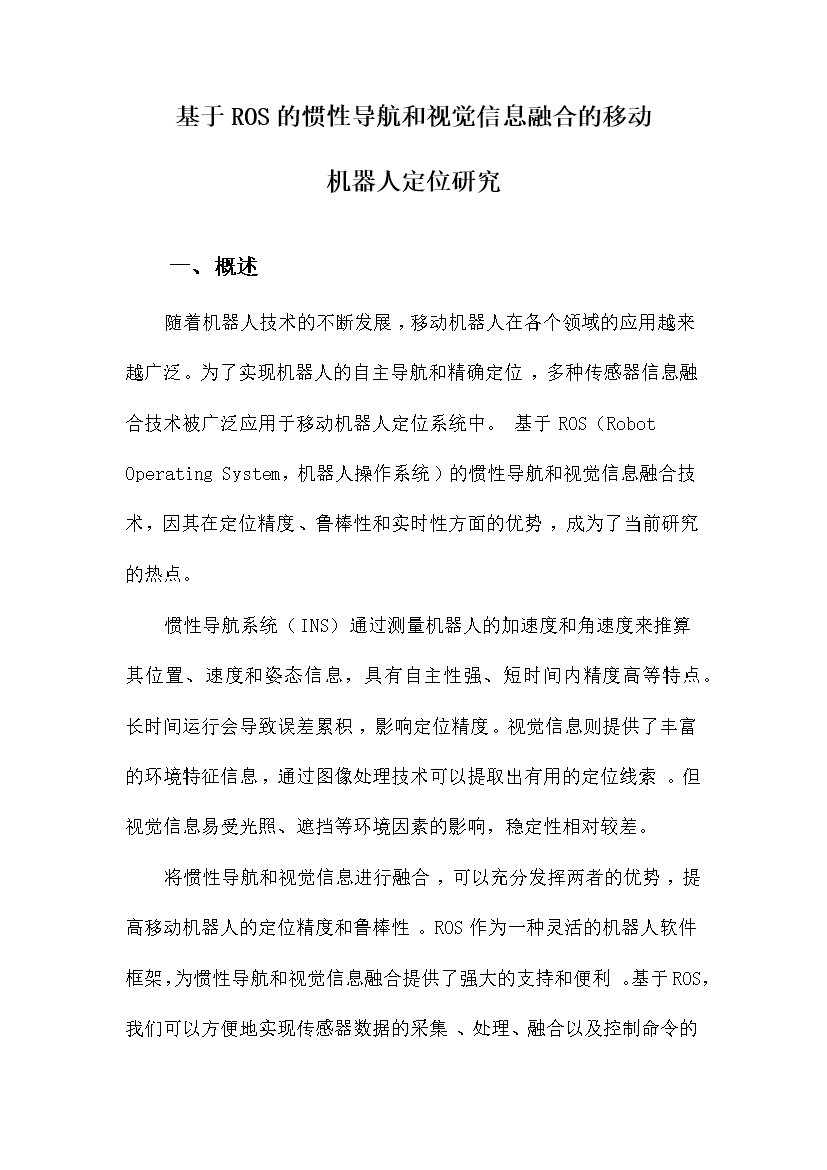
基于ROS的惯性导航和视觉信息融合的移动机器人定位研究一、概述随着机器人技术的不断发展,移动机器人在各个领域的应用越来越广泛。为了实现机器人的自主导航和精确定位,多种传感器信息融合技术被广泛应用于移动机器人定位系统中。基于ROS(RobotOperatingSystem,机器人操作系统)的惯性导航和视觉信息融合技术,因其在定位精度、鲁棒性和实时性方面的优势,成为了当前研究的热点。惯性导航系统(INS)通过测量机器人的加速度和角速度来推算其位置、速度和姿态信息,具有自主性强、短时间内精度高等特点。长时间运行

基于惯性传感器和视觉里程计的机器人定位.docx
基于惯性传感器和视觉里程计的机器人定位摘要随着机器人技术的不断发展,机器人的定位问题变得越来越重要。在本论文中,我们提出了一种基于惯性传感器和视觉里程计的机器人定位方法。该方法利用机器人上的惯性传感器,如加速度计和陀螺仪,以及视觉里程计来估计机器人的位置。具体而言,我们首先介绍了惯性传感器的基本原理和数据融合算法,然后讨论了视觉里程计的原理和应用。接下来,我们提出了一种利用惯性传感器和视觉里程计的定位算法,并使用实验数据进行验证。最后,我们讨论了该方法的优点和局限性,并提出了进一步改进的方向。关键词:机器