
基于多深度相机融合的机械臂抓取系统.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多深度相机融合的机械臂抓取系统.pptx
汇报人:CONTENTSPARTONEPARTTWO定义与背景系统组成与工作原理深度相机在系统中的作用PARTTHREE深度相机工作原理多深度相机数据融合方法融合算法优化与实现PARTFOUR机械臂运动学模型抓取点计算与优化抓取过程中的传感器信息处理PARTFIVE实验设置与条件实验结果展示结果分析与讨论PARTSIX系统优势分析局限性及改进方向与其他抓取系统的比较PARTSEVEN实际应用场景与案例分析技术发展趋势与展望汇报人:
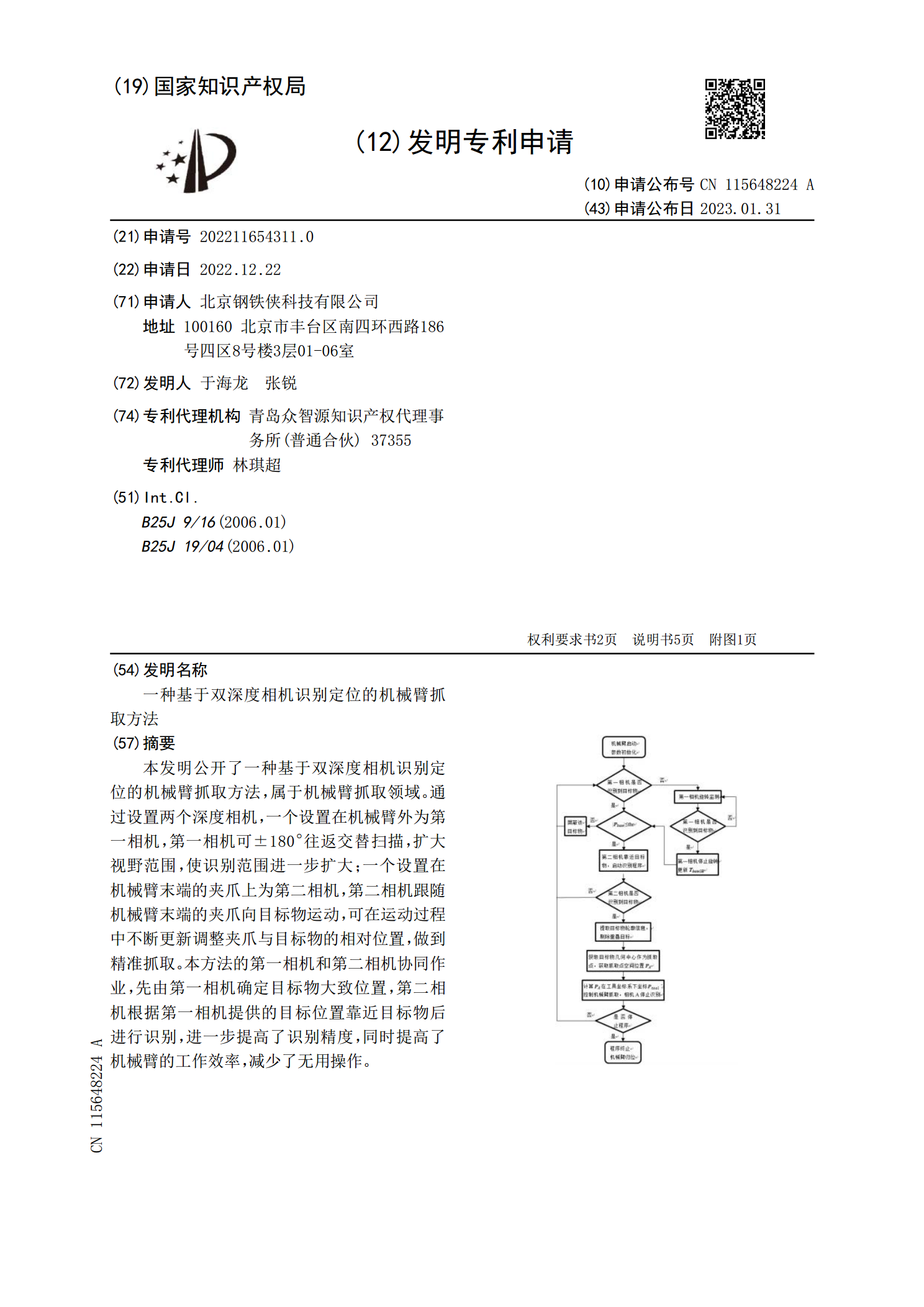
一种基于双深度相机识别定位的机械臂抓取方法.pdf
本发明公开了一种基于双深度相机识别定位的机械臂抓取方法,属于机械臂抓取领域。通过设置两个深度相机,一个设置在机械臂外为第一相机,第一相机可±180°往返交替扫描,扩大视野范围,使识别范围进一步扩大;一个设置在机械臂末端的夹爪上为第二相机,第二相机跟随机械臂末端的夹爪向目标物运动,可在运动过程中不断更新调整夹爪与目标物的相对位置,做到精准抓取。本方法的第一相机和第二相机协同作业,先由第一相机确定目标物大致位置,第二相机根据第一相机提供的目标位置靠近目标物后进行识别,进一步提高了识别精度,同时提高了机械臂的工

基于视觉引导的机械臂抓取系统研究.docx
基于视觉引导的机械臂抓取系统研究基于视觉引导的机械臂抓取系统研究摘要:近年来,随着机器视觉技术的不断发展和应用需求的增加,视觉引导的机械臂抓取系统逐渐成为研究的热点。本文以视觉引导的机械臂抓取系统为研究对象,结合现有技术和方法进行综述和分析,并提出了一种基于视觉引导的机械臂抓取系统的实现方案。研究结果表明,基于视觉引导的机械臂抓取系统具有较高的准确性和灵活性,可以广泛应用于制造业、仓储物流、医疗等领域,并具有很大的研究和应用价值。关键词:机械臂;抓取系统;视觉引导;准确性;灵活性1.引言机械臂是一种能够模

基于机器视觉的机械臂智能抓取系统设计.docx
基于机器视觉的机械臂智能抓取系统设计【摘要】机器视觉技术在机械臂智能抓取系统中发挥着重要作用,本文针对机器视觉技术在机械臂抓取中的应用进行了深入研究。首先介绍了机械臂抓取系统的概念及其重要性,然后详细分析了机器视觉技术在机械臂抓取中的作用和优势,最后提出了一个基于机器视觉的机械臂智能抓取系统设计方案,并对该方案的可行性进行了分析和评估。通过本研究,可以提高机械臂抓取的准确性和效率,为机器人应用领域带来更多的发展机会。【关键词】机器视觉;机械臂;智能抓取;系统设计【引言】机器视觉技术是计算机科学与工程学领域

基于点云相机的机械臂抓取位姿生成方法研究.docx
基于点云相机的机械臂抓取位姿生成方法研究标题:基于点云相机的机械臂抓取位姿生成方法研究摘要:近年来,机械臂技术在工业自动化领域得到广泛应用。机械臂的抓取位姿生成是机械臂操作中的关键问题之一。传统的位姿生成方法依赖于已知的物体模型和准确定位,但在实际应用中往往受到目标物体形状复杂、表面纹理变化等因素的限制。本文研究了基于点云相机的机械臂抓取位姿生成方法,通过对目标物体进行三维重建和位姿检测,实现了对复杂形状和表面变化物体的准确抓取位姿生成,并进行了相关实验验证。关键词:机械臂;抓取位姿生成;点云相机;三维重