
基于引导滤波及视差图融合的立体匹配.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于引导滤波及视差图融合的立体匹配.pptx
汇报人:目录PARTONEPARTTWO立体匹配技术的定义立体匹配技术的分类立体匹配技术的应用场景PARTTHREE引导滤波的原理引导滤波在立体匹配中的实现方式引导滤波在立体匹配中的优势与局限性PARTFOUR视差图融合的原理视差图融合在立体匹配中的实现方式视差图融合在立体匹配中的优势与局限性PARTFIVE基于引导滤波及视差图融合的立体匹配方法概述方法实现流程方法优势与局限性PARTSIX实验数据集与实验环境实验结果展示结果分析与其他方法的比较PARTSEVEN研究结论研究不足与展望THANKYOU

基于双目立体匹配的视差提取算法研究的中期报告.docx
基于双目立体匹配的视差提取算法研究的中期报告1.研究背景与意义视觉是人类感知世界的重要方式之一,其对于环境感知、深度判断、空间认知等具有重要作用。在计算机视觉中,立体视觉技术常被用于三维重建、机器人导航、虚拟现实等领域。通过提取两个视点之间的视差信息,可以计算出场景中物体的深度信息,从而实现对三维环境的认知和重建。2.研究内容本次研究的主要内容为基于双目立体匹配的视差提取算法研究。该算法主要包括以下步骤:(1)图像预处理:包括图像去噪、图像增强、图像配准等步骤,以提高后续视差计算的准确性。(2)特征点提取

基于视差区域分割的动态规划立体匹配算法改进.docx
基于视差区域分割的动态规划立体匹配算法改进标题:基于视差区域分割的动态规划立体匹配算法改进摘要:在计算机视觉和机器视觉领域中,立体匹配技术是一种关键性的技术。它旨在通过分析两幅图像中物体的深度差异来实现三维重建。动态规划是一种常见的立体匹配算法,但在处理复杂场景时,其效果不佳。本论文提出了一种基于视差区域分割的动态规划立体匹配算法改进,通过引入视差区域分割和一些优化技术,提高了算法的匹配准确性和效率。1.引言立体匹配技术在计算机视觉和机器视觉领域中具有重要意义。它对于三维场景重建、物体追踪和深度感知等应用

基于双目立体匹配的视差提取算法研究的中期报告.docx
基于双目立体匹配的视差提取算法研究的中期报告一、研究背景立体视觉是指通过两个视点(即双目)对同一物体或场景进行观察,获得的两幅图像配对,从而获取深度信息的技术。在机器人、自动驾驶、医学影像等领域广泛应用。其中,双目视觉匹配算法的基础是对像素点的视差提取。视差提取算法的准确度和效率直接影响到双目视觉匹配的结果。因此,研究基于双目立体匹配的视差提取算法是一个具有重要意义和应用前景的课题。目前,视差提取算法的主要方法有基于传统特征的、基于图像分割的、基于机器学习的等。在这些算法中,变分方法由于其在凸性较强的问题
基于多传感融合的稠密视差图提取方法、系统和智能终端.pdf
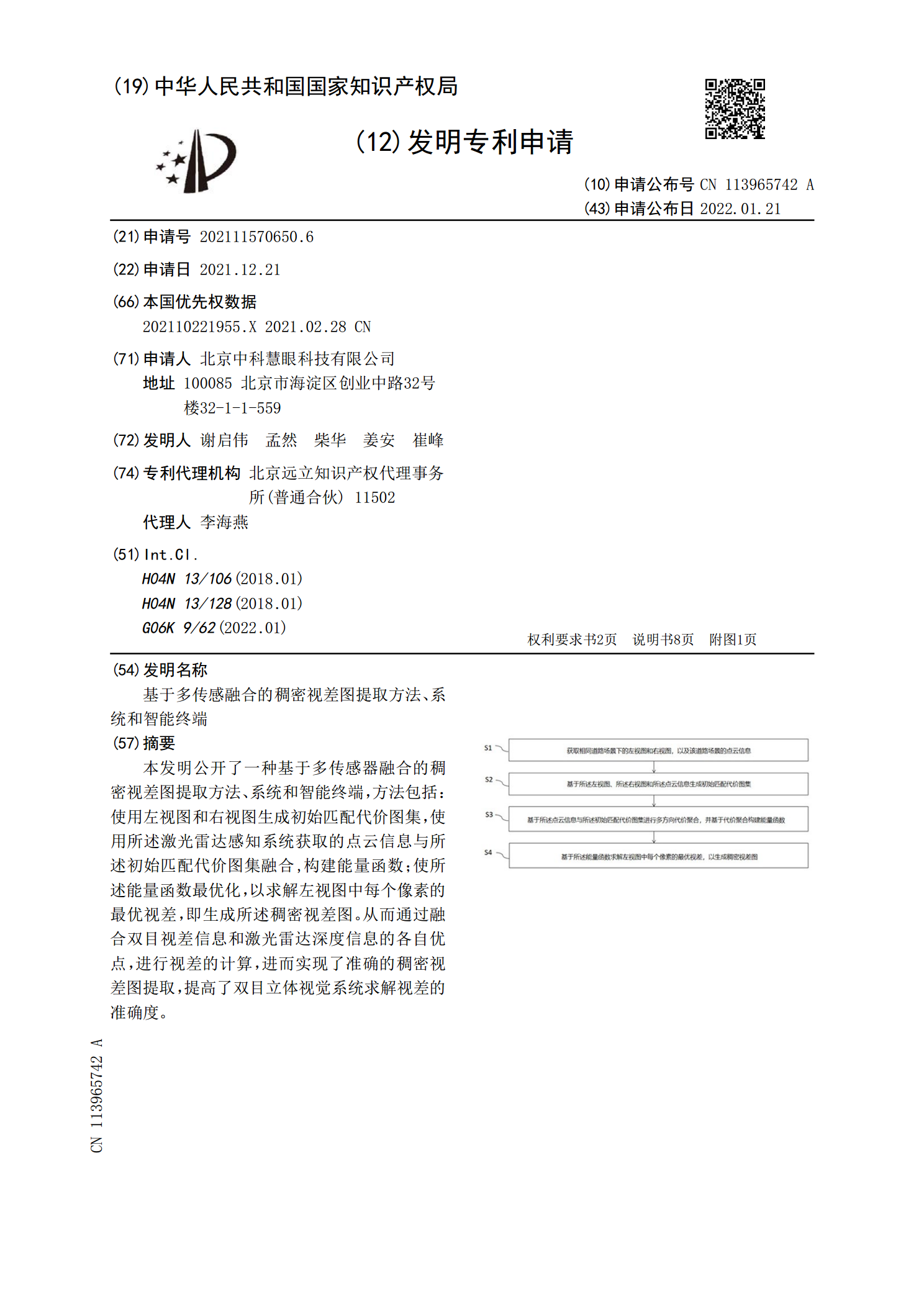
本发明公开了一种基于多传感器融合的稠密视差图提取方法、系统和智能终端,方法包括:使用左视图和右视图生成初始匹配代价图集,使用所述激光雷达感知系统获取的点云信息与所述初始匹配代价图集融合,构建能量函数;使所述能量函数最优化,以求解左视图中每个像素的最优视差,即生成所述稠密视差图。从而通过融合双目视差信息和激光雷达深度信息的各自优点,进行视差的计算,进而实现了准确的稠密视差图提取,提高了双目立体视觉系统求解视差的准确度。