
基于SPH的流体控制与触觉交互研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于SPH的流体控制与触觉交互研究的任务书.docx
基于SPH的流体控制与触觉交互研究的任务书任务书任务标题:基于SPH的流体控制与触觉交互研究研究背景:随着计算机技术和机器人技术的不断发展,在机器人领域涌现出许多新的研究方向。其中一个研究方向是利用流体控制技术,实现机器人的精准控制和灵活运动。而触觉交互技术可以让机器人更加智能化,更具有人机交互能力,实现更加自主化的操作和控制。因此,基于SPH的流体控制与触觉交互研究具有很高的研究价值和应用前景。研究内容:1.流体控制技术研究(1)SPH理论和数值模拟方法的研究(2)基于SPH的流体模拟算法的设计与实现(

基于SPH的流体控制与触觉交互研究的开题报告.docx
基于SPH的流体控制与触觉交互研究的开题报告尊敬的评审专家:本文题目为“基于SPH的流体控制与触觉交互研究”。流体控制和触觉交互是当前机器人领域的研究热点,其在工业生产、医疗护理和娱乐等方面具有广泛应用前景。本文将采用SPH(SmoothedParticleHydrodynamics)方法模拟流体,同时探究交互界面设计与用户体验的相关问题。本文的主要工作内容如下:1.研究SPH方法原理和流体模拟算法。SPH方法是一种基于粒子模型的流体模拟方法,具有较高的计算精度和适用范围。本文将系统介绍SPH的基本原理和
一种SPH多相流触觉交互研究的方法.pdf
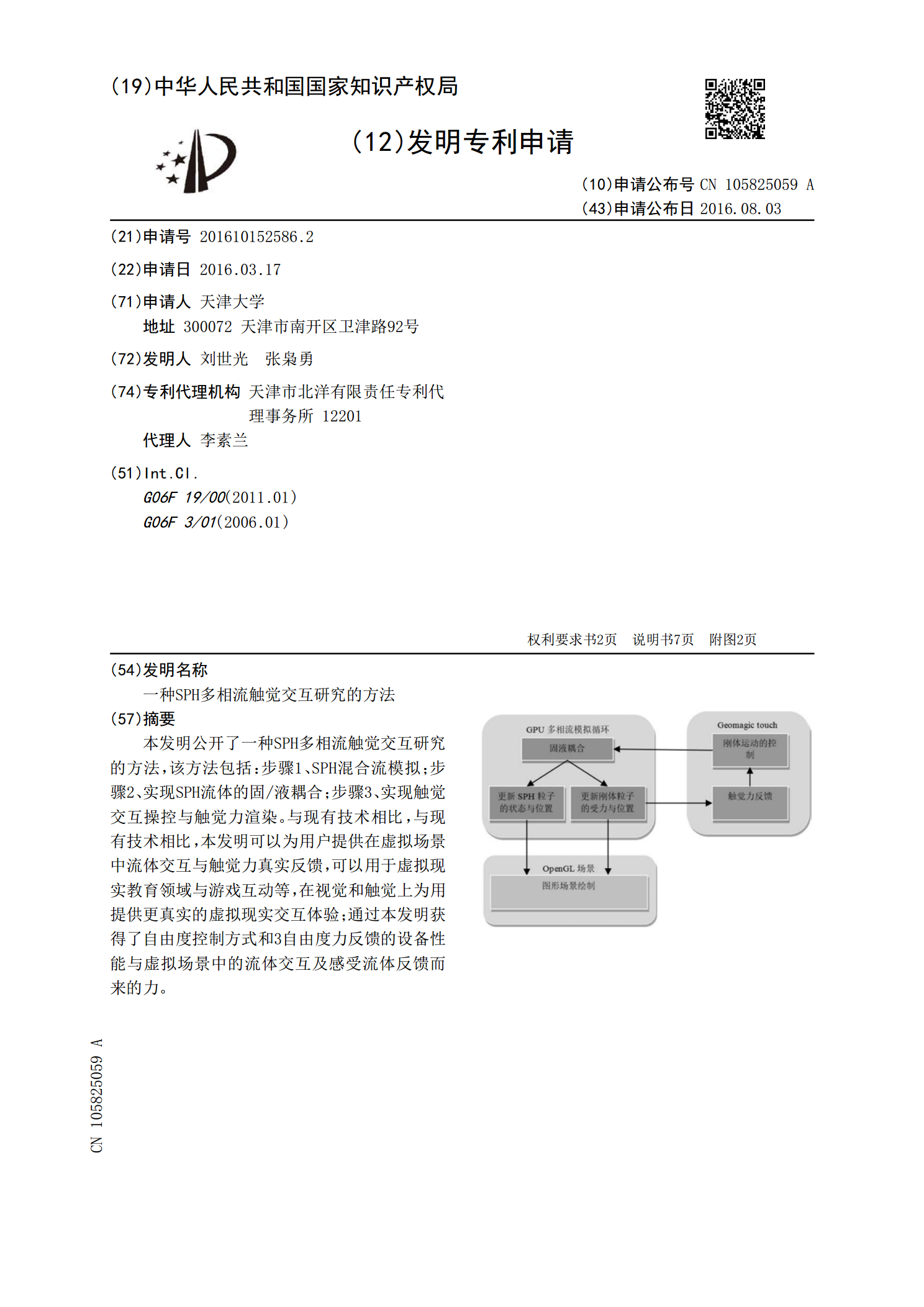
本发明公开了一种SPH多相流触觉交互研究的方法,该方法包括:步骤1、SPH混合流模拟;步骤2、实现SPH流体的固/液耦合;步骤3、实现触觉交互操控与触觉力渲染。与现有技术相比,与现有技术相比,本发明可以为用户提供在虚拟场景中流体交互与触觉力真实反馈,可以用于虚拟现实教育领域与游戏互动等,在视觉和触觉上为用提供更真实的虚拟现实交互体验;通过本发明获得了自由度控制方式和3自由度力反馈的设备性能与虚拟场景中的流体交互及感受流体反馈而来的力。

基于SPH方法的流体边界处理的研究.docx
基于SPH方法的流体边界处理的研究基于SPH方法的流体边界处理的研究摘要:随着计算机技术的发展,基于流体动力学的仿真研究变得越来越重要。在流体仿真中,流体边界处理是一个关键问题。SPH方法作为目前流体仿真领域广泛应用的方法之一,在流体边界处理方面具有很大的优势。本文首先介绍了SPH方法的原理和基本步骤,然后重点研究了SPH方法在流体边界处理方面的应用,包括壁面处理、自由表面模拟和流体与刚体的相互作用等方面。最后,本文总结了目前的研究进展,指出了目前研究中存在的问题,并对未来的研究方向提出了展望。关键词:S

基于触觉反馈的虚拟下颌整形手术交互技术的研究的任务书.docx
基于触觉反馈的虚拟下颌整形手术交互技术的研究的任务书任务书一、研究背景面部整形手术在美容领域中越来越受到消费者的青睐,而下颌整形手术成为其中较为热门的选择之一。然而,手术操作期间的风险和术后恢复过程中的不适感,让许多人望而却步。因此,寻找一种不需要实际手术体验,却能让患者了解手术效果的手段,就成为了亟待解决的问题。同时,科技的飞速发展,尤其是虚拟现实技术能为医学研究提供新的思路和应用场景。因此,利用虚拟现实技术设计一款虚拟下颌整形手术系统,则成为当前一个热门领域的研究方向。二、研究目的本文的研究目的是通过