
旋转磁场电动式磁悬浮系统的建模与控制的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

旋转磁场电动式磁悬浮系统的建模与控制的任务书.docx
旋转磁场电动式磁悬浮系统的建模与控制的任务书任务书一、项目背景磁悬浮技术是一种非接触式悬浮技术,广泛应用于高速列车、磁悬浮飞行器、磁浮轴承等领域。旋转磁场电动式磁悬浮系统是磁悬浮技术中的一种重要形式,采用旋转磁场作为悬浮力的产生源,具有结构简单、控制方便、稳定性好等优点。因此,对于这种旋转磁场电动式磁悬浮系统的建模和控制研究具有重要的理论和实际意义。二、研究目的本项目旨在对旋转磁场电动式磁悬浮系统进行建模与控制研究,深入探究该系统的运动特性和控制策略,为其在高速列车、磁悬浮飞行器、磁浮轴承等领域的应用提供

旋转磁场电动式磁悬浮系统控制的任务书.docx
旋转磁场电动式磁悬浮系统控制的任务书任务书一、任务背景旋转磁场电动式磁悬浮系统是一种利用永磁同步电机和电磁轴承实现悬浮和控制的新型悬浮系统。它具有结构简单,响应速度快,精度高等优点,在交通运输、工业制造和科研领域具有广阔的应用前景。为了实现对旋转磁场电动式磁悬浮系统的控制,本次任务旨在设计并实现控制算法和系统控制板,保证系统的稳定运行和高精度悬浮。二、任务目标1.设计旋转磁场电动式磁悬浮系统的控制算法,实现对系统悬浮过程的稳定控制。2.开发系统控制板,实现对各个部分的控制和信号处理。3.实现系统的位置控制
高温超导旋转磁场电动式磁悬浮系统.pdf
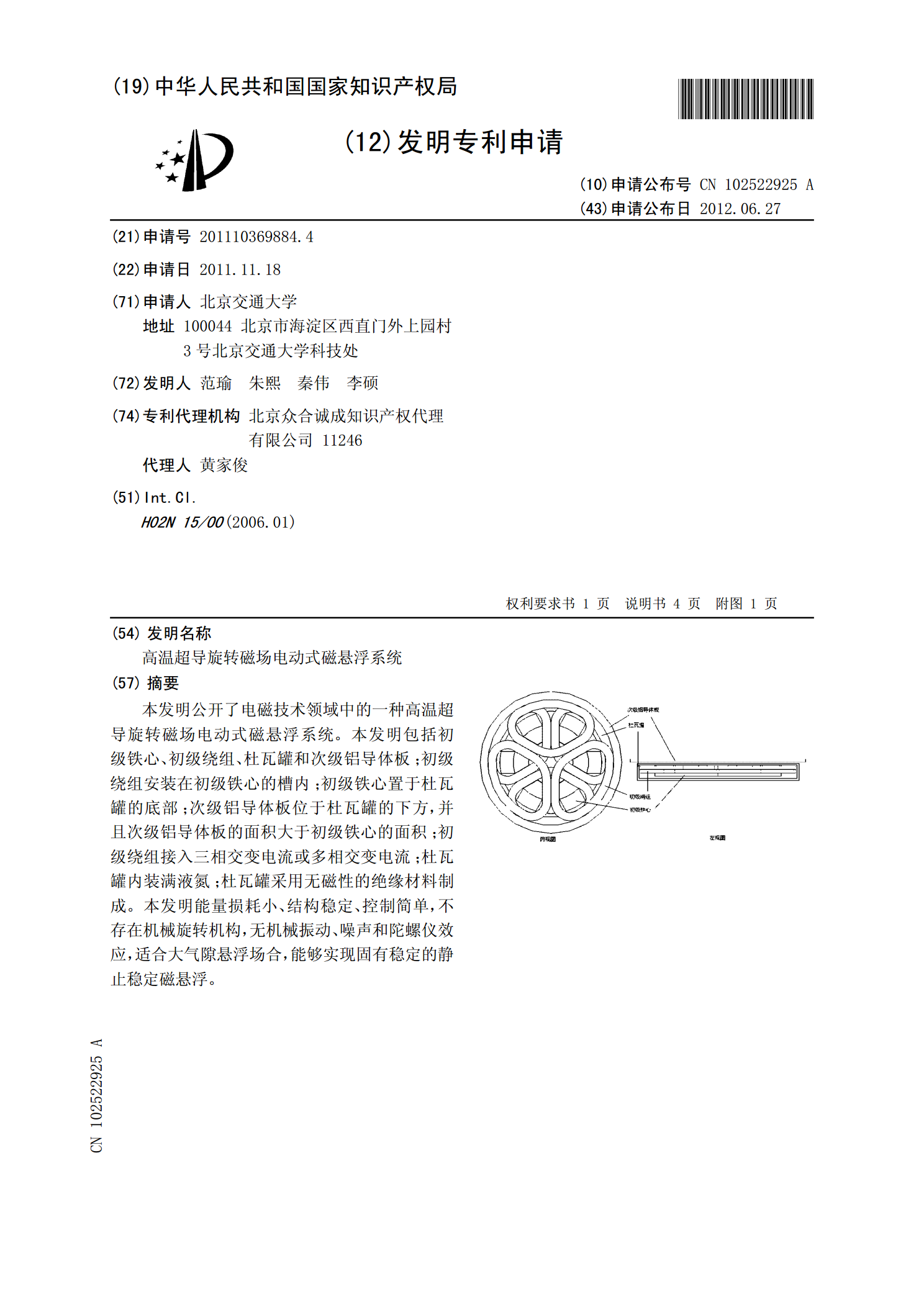
本发明公开了电磁技术领域中的一种高温超导旋转磁场电动式磁悬浮系统。本发明包括初级铁心、初级绕组、杜瓦罐和次级铝导体板;初级绕组安装在初级铁心的槽内;初级铁心置于杜瓦罐的底部;次级铝导体板位于杜瓦罐的下方,并且次级铝导体板的面积大于初级铁心的面积;初级绕组接入三相交变电流或多相交变电流;杜瓦罐内装满液氮;杜瓦罐采用无磁性的绝缘材料制成。本发明能量损耗小、结构稳定、控制简单,不存在机械旋转机构,无机械振动、噪声和陀螺仪效应,适合大气隙悬浮场合,能够实现固有稳定的静止稳定磁悬浮。

旋转磁场电动式磁悬浮系统的变频电源设计的任务书.docx
旋转磁场电动式磁悬浮系统的变频电源设计的任务书任务书题目:旋转磁场电动式磁悬浮系统的变频电源设计背景:磁悬浮技术是一种典型的无接触悬浮技术,具有无磨损、无噪音、高效率等优点,在高速列车、飞行器、机床等应用领域具有广泛的应用前景。其中,旋转磁场电动式磁悬浮系统由于其结构简单、控制方便等特点,已经成为了研究热点。变频电源是控制旋转磁场电动式磁悬浮系统的关键设备之一,其稳定可靠的工作对于磁悬浮系统的正常运行和控制至关重要。因此,本次设计的任务是设计一种变频电源,以满足旋转磁场电动式磁悬浮系统的工作要求。目标:本

高温超导电动式磁悬浮系统装置及实验研究的任务书.docx
高温超导电动式磁悬浮系统装置及实验研究的任务书任务书一、任务背景磁悬浮技术是近年来发展迅速的一种高科技交通工具。与传统的轨道交通相比,磁悬浮列车拥有更高的运行速度、更低的能耗以及更广阔的应用前景。同时,磁悬浮技术的实现也带来了一系列新的工程和科研挑战。其中之一是如何选择合适的超导材料以提高磁悬浮系统的性能和稳定性。由于高温超导材料具有较高的临界温度、较高的载流能力和较低的电阻率,因此已经成为磁悬浮系统的理想材料。二、任务目标本实验的主要目标是设计和构造一个高温超导电动式磁悬浮系统装置,并进行系统性能实验研