
机械工程测试技术基础.pptx

骑着****猪猪


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共50页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械工程测试技术基础.pptx
第三章、常用传感器第三章、常用传感器如图所示,假如在a、b端通以电流I,在c、d端就会出线电位差,称为霍尔电动势VH霍尔效应产生旳机理:运动电荷受磁场中洛伦兹力作用旳成果霍尔元件:霍尔效应传感器霍尔元件由霍尔片、四根引线和壳体构成,如图示。霍尔元件旳基本测量电路霍尔元件旳应用:霍尔传感器最直接旳应用是用来测量磁场强度,另外还可间接用来测量产生或影响磁场旳物理量,如力、位移、速度、加速度等参量。位置测量转速测量电流测量无损检测3.7磁敏元件传感器测转角:叶片和齿轮位置传感器案例:汽车速度测量:电流传感器电流

机械工程测试技术基础.docx
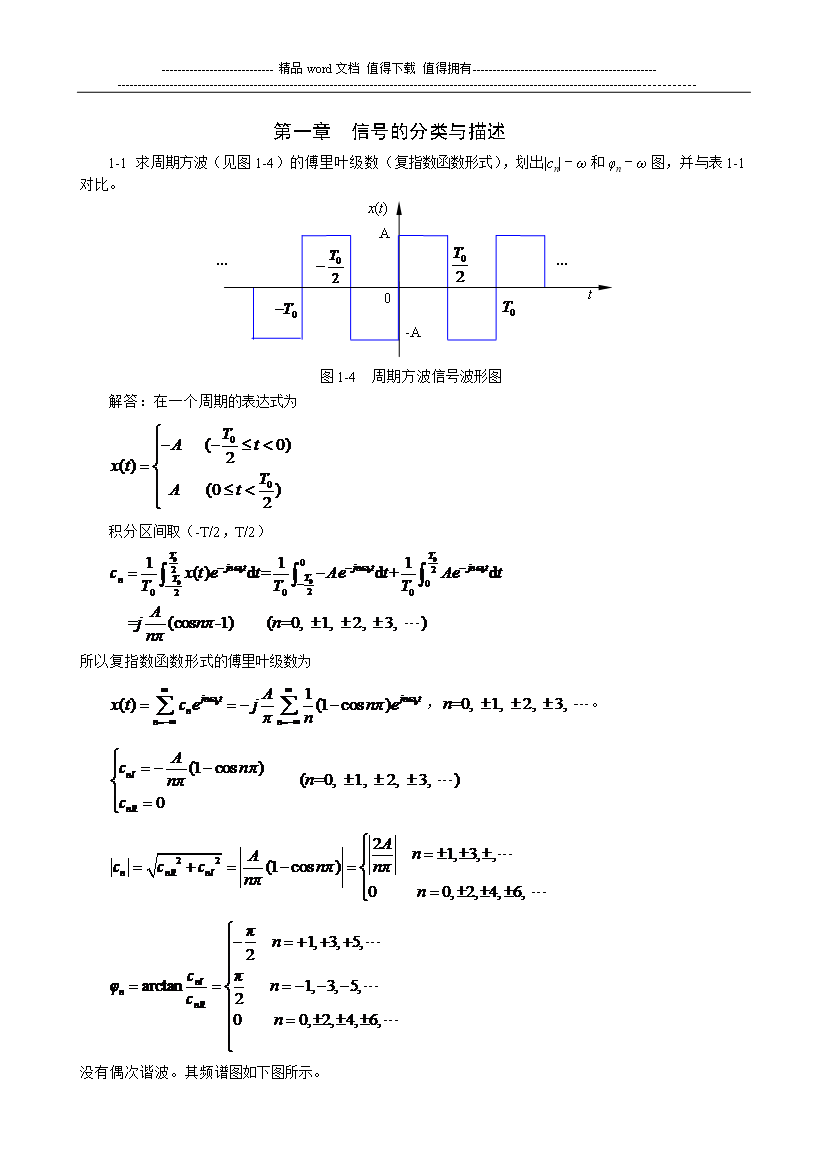
第一章信号的分类与描述1-1求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|cn|–ω和φn–ω图,并与表1-1对比。图1-4周期方波信号波形图0tx(t)……A-A解答:在一个周期的表达式为积分区间取(-T/2,T/2)所以复指数函数形式的傅里叶级数为,。没有偶次谐波。其频谱图如下图所示。|cn|φnπ/2-π/2ωωω0ω03ω05ω03ω05ω02A/π2A/3π2A/5π幅频图相频图周期方波复指数函数形式频谱图2A/5π2A/3π2A/π-ω0-3ω0-5ω0-ω0-3ω0-5ω01

《-机械工程测试技术基础-》.doc
《机械工程测试技术基础》-第三版-熊诗波等著绪论0-1叙述我国法定计量单位的基本内容。解答:教材P4~5,二、法定计量单位。0-2如何保证量值的准确和一致?解答:(参考教材P4~6,二、法定计量单位~五、量值的传递和计量器具检定)1、对计量单位做出严格的定义;2、有保存、复现和传递单位的一整套制度和设备;3、必须保存有基准计量器具,包括国家基准、副基准、工作基准等。3、必须按检定规程对计量器具实施检定或校准,将国家级准所复现的计量单位量值经过各级计算标准传递到工作计量器具。0-3何谓测量误差?通常测量误差
机械工程测试技术基础.docx
----------------------------精品word文档值得下载值得拥有--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------第一章信号的分类与描述1-1求周期方波(见图1
机械工程测试技术基础.ppt
第四节A/D转换及信号记录装置典型数字控制系统框图第四节A/D转换及信号记录装置(1)采样定理(2)采样-保持电路模拟信号经采样后,得到一系列样值脉冲,采样脉冲的宽度tw一般是很短暂的,在下一个采样脉冲到来之前,应暂时保持所取得的样值脉冲幅度不变,以便进行转换。因此,在采样电路之后须加保持电路。MOS管,做模拟开关VO第四节A/D转换及信号记录装置例如:要将01V的模拟电压转换为三位二进制代码。方法2:取=2/15V,01V的电压以0×表示,则二、信号的显示记录装置二、信号的显示记录装置二、信号