
飞思卡尔软件注意事项.pdf

yy****24


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
飞思卡尔软件注意事项.pdf
飞思卡尔些许经验之软件设计------循迹基于电磁传感器,方向以及舵机调控基于B车模(仅供参考)1、电感排布先说下各种排布类型电感的特点:左右竖直电感:对直角弯道十分敏感,可以清楚分辨出来十字弯与直角弯,但是对于曲率较大的S弯道会造成与直角弯道混淆。在直角弯的时候左右电感差异非常大,可以较早判别出直角弯道,与左右水平电感结合可排除竖直电感对直角弯与大曲率S弯的误判左右水平电感:很适合判断直道以及小曲率弯道车子处在中心线的位置,但是对于曲率较大的S弯道与直角弯可能会造成左右判断相反的情况(即明明车子左偏赛道
飞思卡尔软件应用与C语言编程要点.pdf
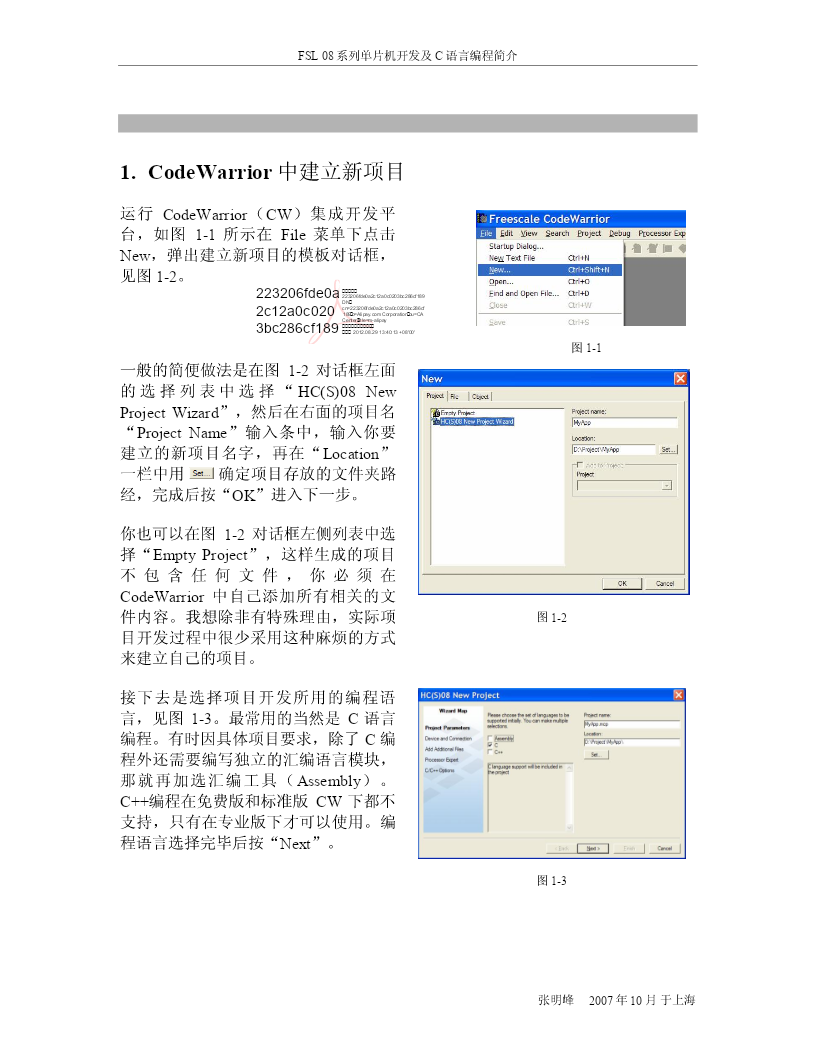
pdfMachinebyBroadgunSoftware-agreatPDFwriter!-agreatPDFcreator!-http://www.pdfmachine.comhttp://www.broadgun.comFSL08系列单片机开发及C语言编程简介1.CodeWarrior中建立新项目运行CodeWarrior(CW)集成开发平台,如图1-1所示在File菜单下点击New,弹出建立新项目的模板对话框,见图1-2。图1-1一般的简便做法是在图1-2对话框左面的选择列表中选择“HC(S)08N

学做智能车挑战飞思卡尔之软件.pptx
会计学第3章智能汽车设计基础—软件3.1编程语言简介3.1编程语言简介3.2控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控

飞思卡尔方案.ppt
一、硬件规格处理器:工业级/车规级芯片,FreescaleARMCortex-A9,主频1.2GHz内存:DDR3SDRAM1G内存;可扩2GFLASH:8GEMMC;可扩16G/32G功耗管理:可进入待机模式,降低功耗;深度休眠电流小于20mA;休眠状态3G模块可与外部通信,进行远程唤醒和数据上报。复位电路、唤醒功能、蜂鸣器、实时时钟、LED灯、预留按钮二、外设接口配置外部存储:1路SD卡;外接SATA硬盘串口:5路UART,其中1路485USB接口:3路USBHOST;1路USBOTG

飞思卡尔的面试.docx
飞思卡尔的面试关于飞思卡尔的面试2008-03-1818:16可能不是很正式吧,很多题目用的是贝尔的原题现在突然想起来了,摘两段,不要弄得出见过的题目还不会做~C++/C试题本试题仅用于考查C++/C程序员的基本编程技能。内容限于C++/C常用语法,不涉及数据结构、算法以及深奥的语法。考试成绩能反映出考生的编程质量以及对C++/C的理解程度,但不能反映考生的智力和软件开发能力。笔试时间90分钟。请考生认真答题,切勿轻视。一、请填写BOOL,float,指针变量与“零值”比较的if语句。(10分)提示:这里