
机械设计基础 轮系.pptx

骑着****猪猪

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机械设计基础轮系.ppt
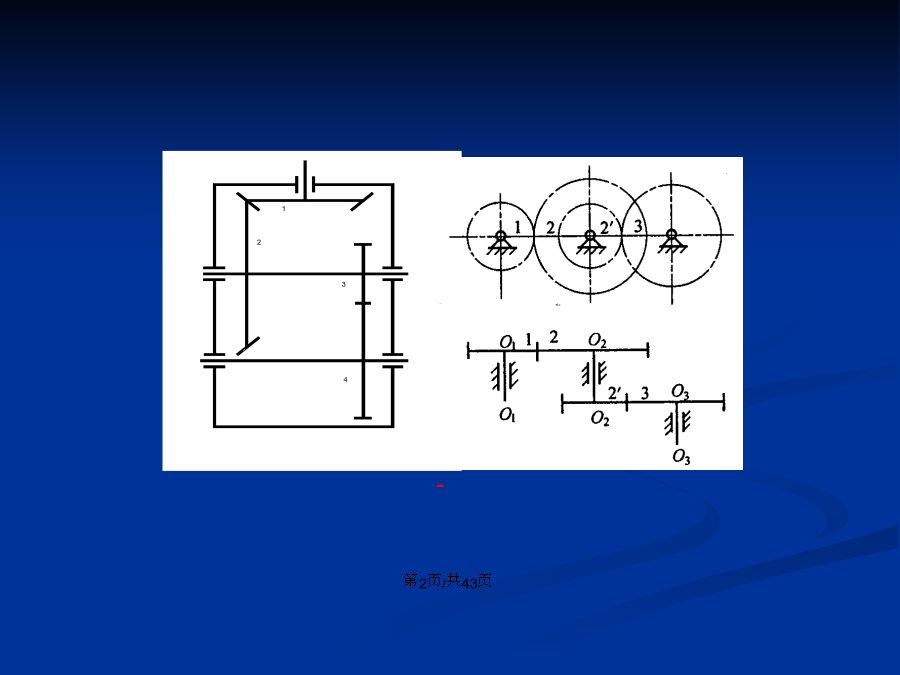
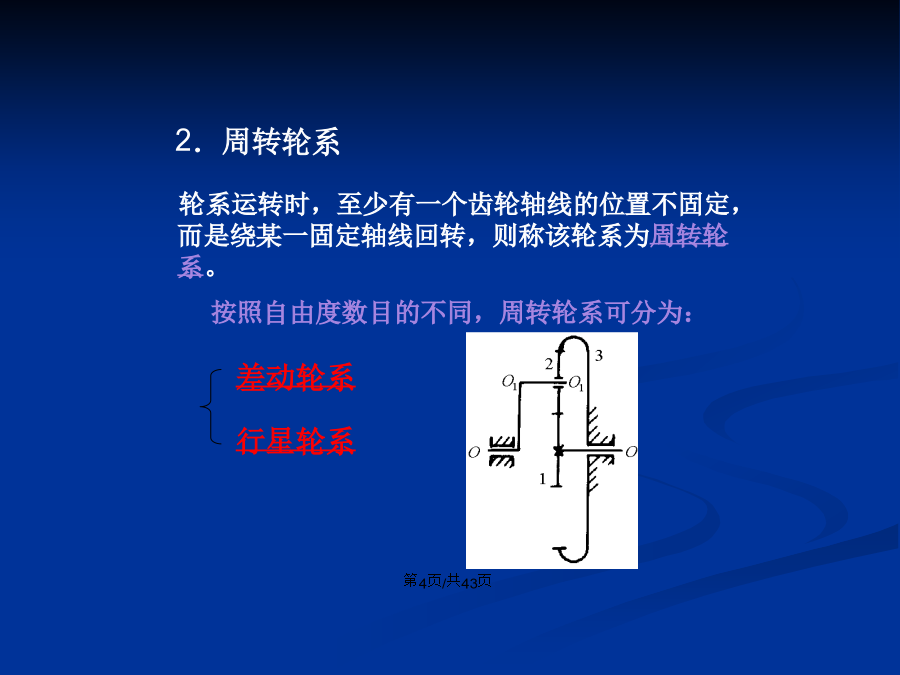
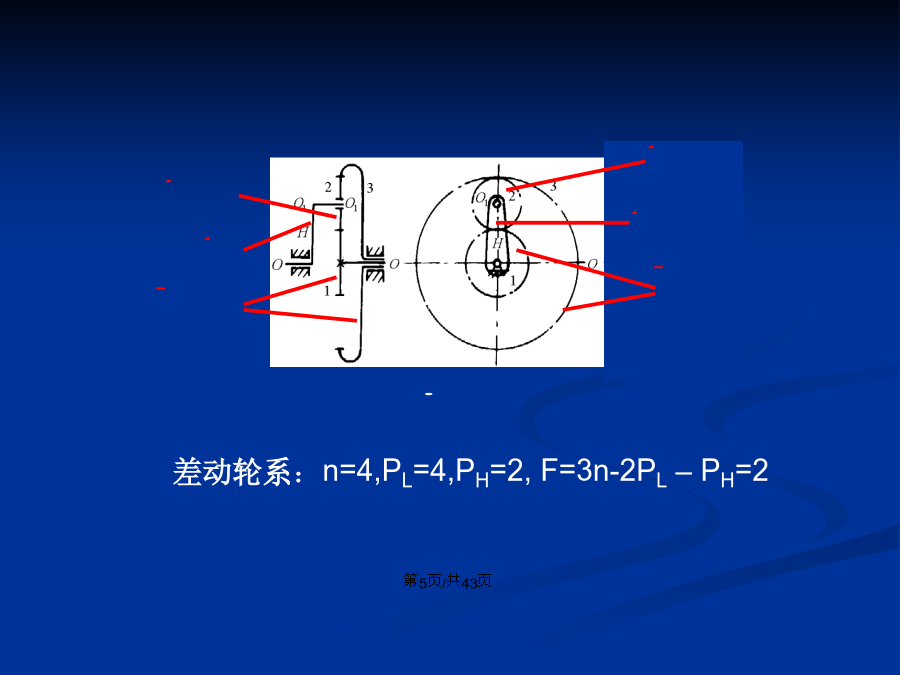
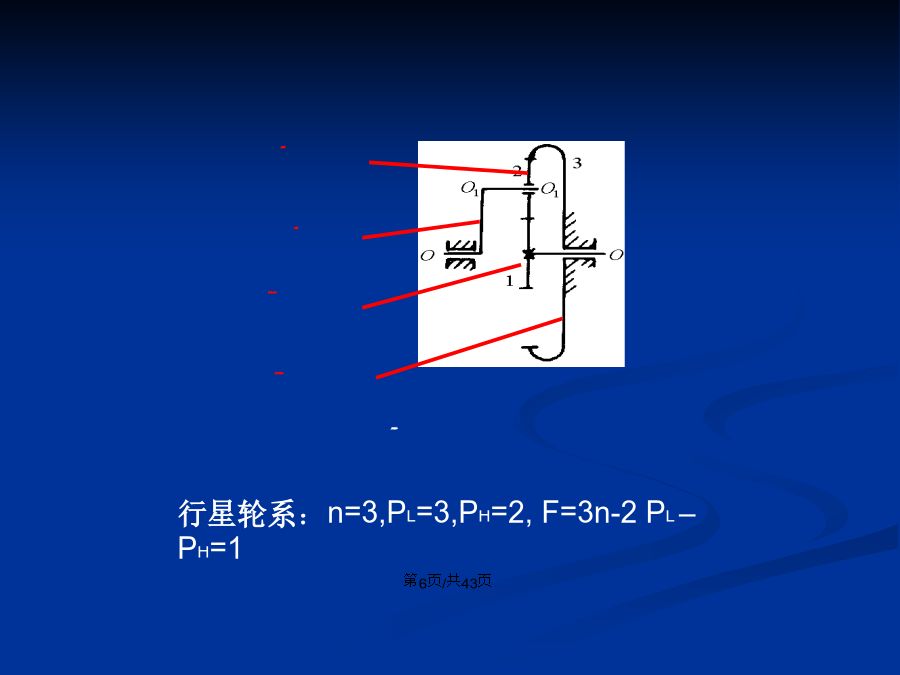
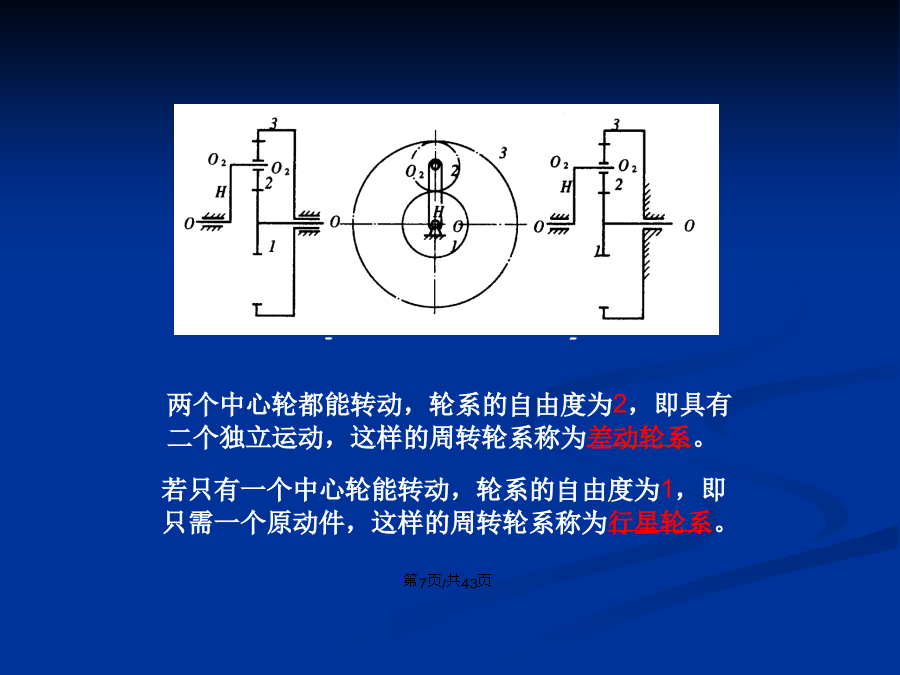
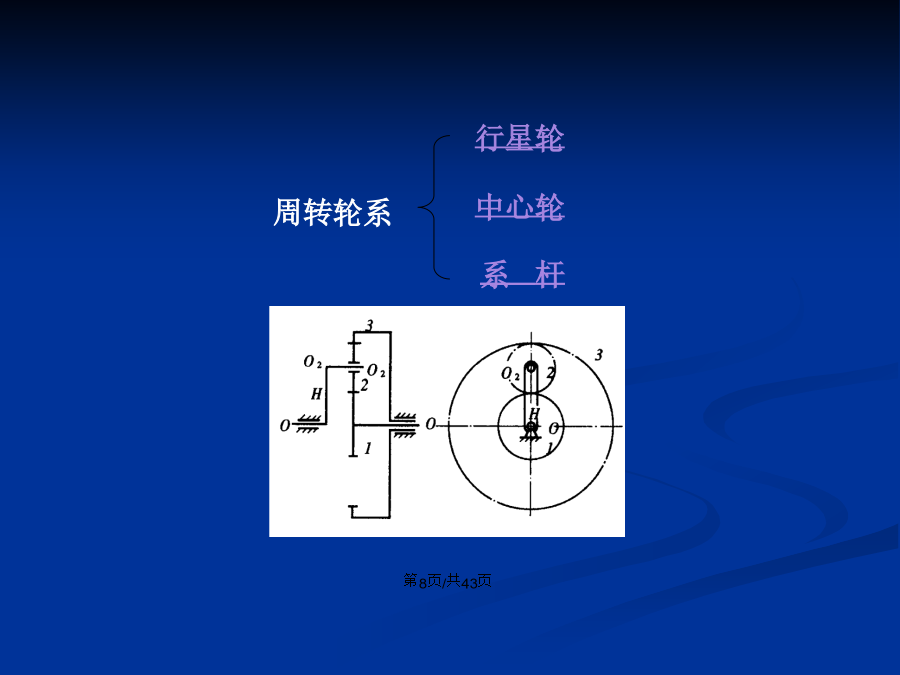
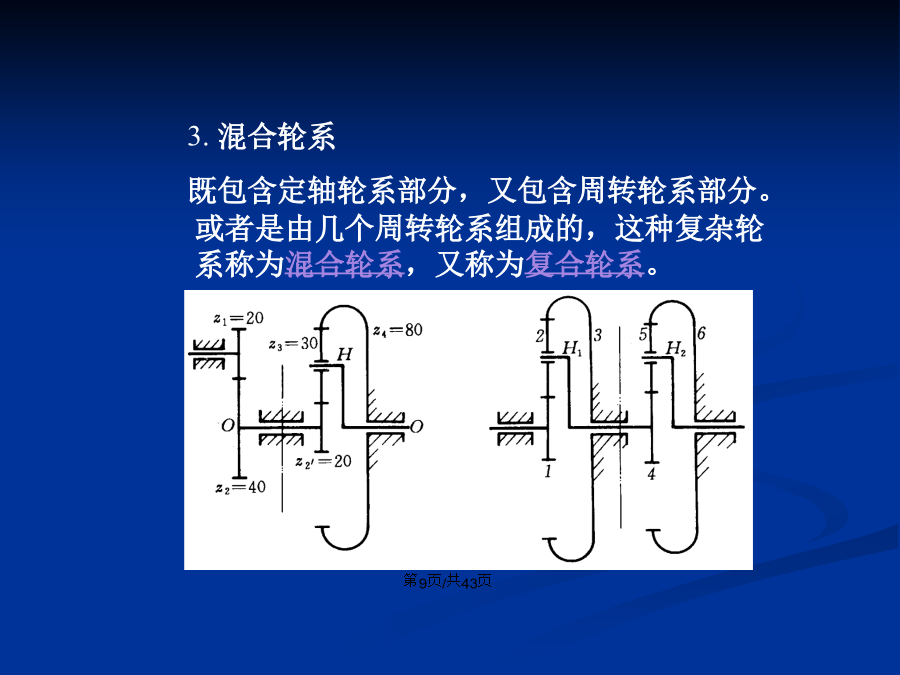
章节要点轮系:用一系列互相啮合的齿轮将主动轴和从动轴连接起来,这种多齿轮的传动装置称为轮系。第六页,编辑于星期日:十五点十二分。1.定轴轮系§6-2定轴轮系的传动比定轴轮系的传动比计算公式为:1、轴线平行,用“+”、“-”表示例题轮系运转时,至少有一个齿轮轴线的位置不固定,而是绕某一固定轴线回转,则称该轮系为周转轮系。按照自由度数目,将周转轮系分为两类:二、周转轮系的传动比假想对整个行星轮系加上一个与行星架转速nH大小相等而方向相反的公共转速-nH这样,就变成了假想的定轴轮系。经过转化的假想定轴轮系,称为

机械设计基础 轮系.pptx
会计学§8.1轮系的分类定轴轮系2.周转轮系周转轮系2.实现分路传动3.实现变速、变向传动4.实现大传动比5.实现运动的合成与分解6.实现大功率的传递§8.2定轴轮系的传动比传动比的计算一般定轴轮系的传动比计算公式为:首末两轴线平行的定轴轮系例8.1图所示的轮系中,设蜗杆1为右旋,转向如图所示,z1=2,z2=40,=18,z3=36,=20,z4=40,=18,z5=45。若蜗杆转速n1=1000r/min,求内齿轮5的转速n5和转向。解:轮系传动比的大小§8.3周转轮系的传动比二、周转轮系的传动比计算
机械设计基础之轮系.pdf
机械设计基础之轮系机械设计基础之轮系轮系是机械设计中重要的基础部分,它的作用主要是通过一系列的齿轮系统传递动力,实现机械设备的运动和动力输出。本文将详细介绍轮系的组成、分类、设计及实际应用。一、轮系的组成轮系通常由一系列的齿轮组成,包括主动轮、从动轮和齿轮轴等。主动轮是动力输入部分,从动轮则是动力输出部分。齿轮轴是用于支撑和固定齿轮的零件,可以分为输入轴和输出轴。此外,轮系中还可能包括超越离合器、安全离合器等辅助装置,以保护轮系免受过度载荷或意外损坏。二、轮系的分类根据轮系中齿轮的形状和啮合方式,可以将轮
机械设计基础-轮系及其设计.ppt
2024/11/4第5章轮系及其设计由一系列齿轮组成的传动系统称为轮系。§5-1轮系及其分类§5-1轮系及其分类§5-1轮系及其分类3、分类:按自由度分:按自由度分:按中心轮个数分:(基本构件)按中心轮个数分:(基本构件)按中心轮个数分:(基本构件)§5-1轮系及其分类轮系的分类温故知新§5—2定轴轮系的传动比§5—2定轴轮系的传动比§5—3周转轮系的传动比注意:三轴线必须平行,否则不能应用上式。定轴轮系+周转轮系1、划分轮系二、轮系的划分方法§5—4组合轮系的传动比电动卷扬机的减速器,已知各

机械设计基础第章轮系.ppt
第7章轮系设计§7-1轮系概述§7-1轮系概述§7-1轮系概述§7-1轮系概述6§7-2定轴轮系传动比计算§7-2定轴轮系传动比计算§7-2定轴轮系传动比计算§7-2定轴轮系传动比计算§7-3周转轮系传动比计算§7-3周转轮系传动比计算§7-3周转轮系传动比计算§7-3周转轮系传动比计算§7-3周转轮系传动比计算§7-3周转轮系传动比计算17§7-3周转轮系传动比计算§7-3周转轮系传动比计算§5-4复合轮系传动比计算§5-4复合轮系传动比计算2223242526272829§5-5轮系的功能§5-5轮系