
主动式膝踝假肢人机协同控制研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动式膝踝假肢人机协同控制研究的开题报告.docx
主动式膝踝假肢人机协同控制研究的开题报告开题报告题目:主动式膝踝假肢人机协同控制研究一、研究背景随着社会的发展,假肢技术不断创新与发展。传统的假肢技术往往需要用户付出大量的体力才能控制假肢,而且缺乏对行走环境的适应性,导致行走困难。近年来,主动式假肢技术的出现,使得假肢用户能更加方便地行走,提高了他们的生活质量。主动式假肢利用传感器和电机来控制假肢的运动,使假肢具备机械臂的功能,极大地帮助了残疾人。由于膝关节和踝关节在行走中承受的压力较大,因此如何实现主动式控制是目前假肢技术发展中面临的一个重要问题。为此
一种膝踝一体化仿生主动假肢.pdf
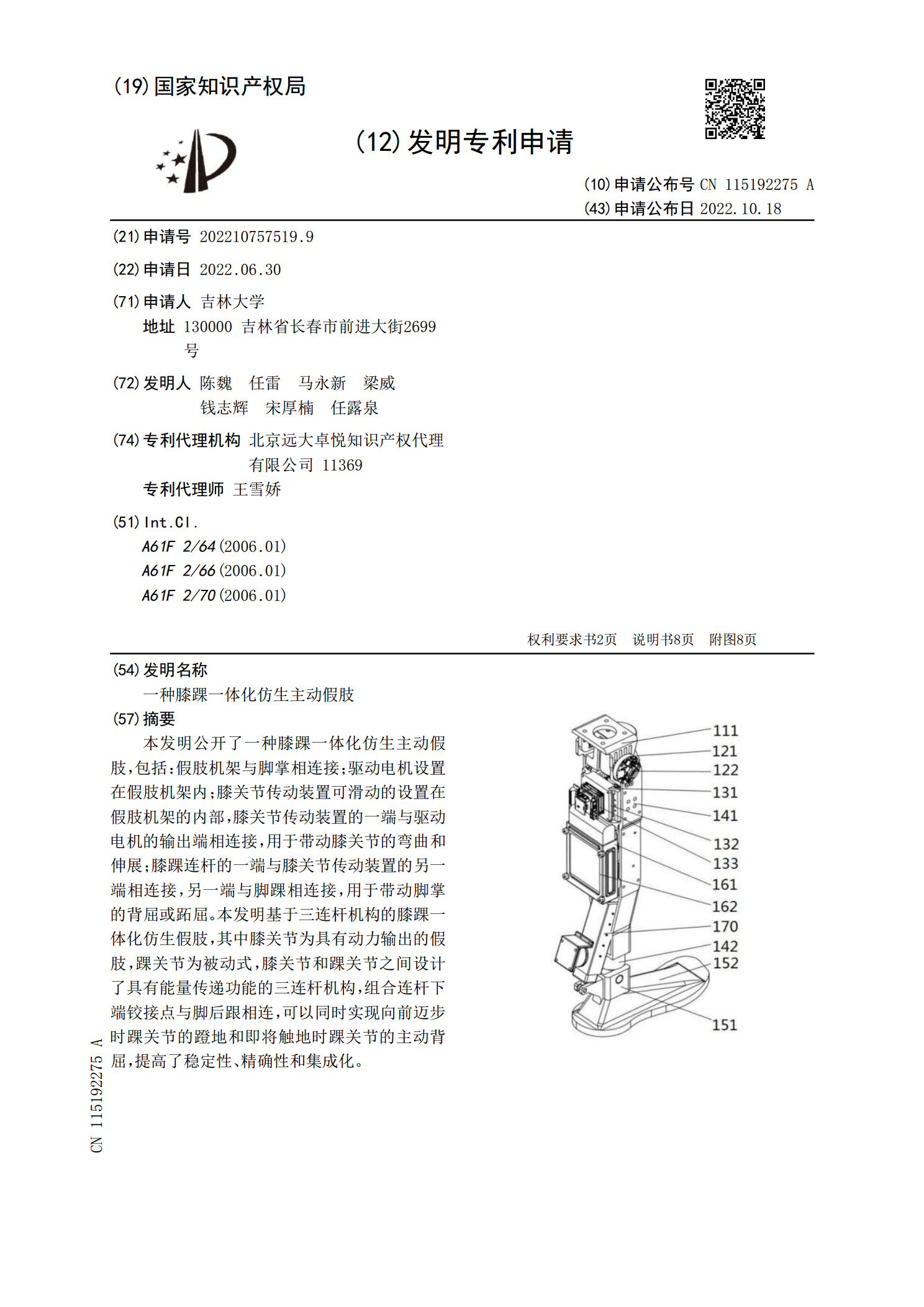
本发明公开了一种膝踝一体化仿生主动假肢,包括:假肢机架与脚掌相连接;驱动电机设置在假肢机架内;膝关节传动装置可滑动的设置在假肢机架的内部,膝关节传动装置的一端与驱动电机的输出端相连接,用于带动膝关节的弯曲和伸展;膝踝连杆的一端与膝关节传动装置的另一端相连接,另一端与脚踝相连接,用于带动脚掌的背屈或跖屈。本发明基于三连杆机构的膝踝一体化仿生假肢,其中膝关节为具有动力输出的假肢,踝关节为被动式,膝关节和踝关节之间设计了具有能量传递功能的三连杆机构,组合连杆下端铰接点与脚后跟相连,可以同时实现向前迈步时踝关节的
一种膝踝关节一体化主动假肢及其控制方法.pdf
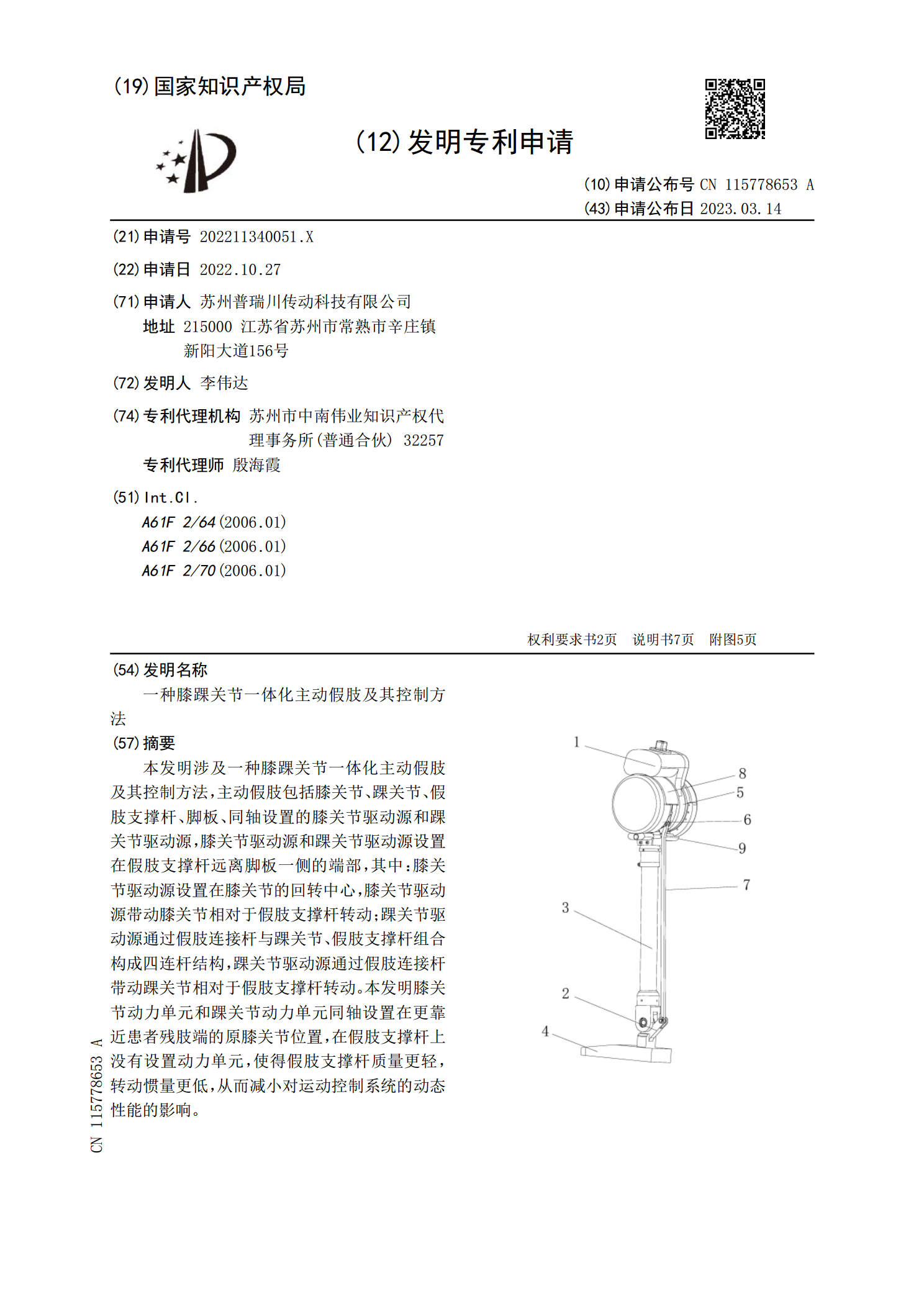
本发明涉及一种膝踝关节一体化主动假肢及其控制方法,主动假肢包括膝关节、踝关节、假肢支撑杆、脚板、同轴设置的膝关节驱动源和踝关节驱动源,膝关节驱动源和踝关节驱动源设置在假肢支撑杆远离脚板一侧的端部,其中:膝关节驱动源设置在膝关节的回转中心,膝关节驱动源带动膝关节相对于假肢支撑杆转动;踝关节驱动源通过假肢连接杆与踝关节、假肢支撑杆组合构成四连杆结构,踝关节驱动源通过假肢连接杆带动踝关节相对于假肢支撑杆转动。本发明膝关节动力单元和踝关节动力单元同轴设置在更靠近患者残肢端的原膝关节位置,在假肢支撑杆上没有设置动力

多并网逆变器的协同主动热控制方法研究的开题报告.docx
多并网逆变器的协同主动热控制方法研究的开题报告一、研究背景随着太阳能光伏的应用不断扩大,伴随着电网的高度智能化和发展,多并网逆变器的应用也越来越广泛。多并网逆变器主要是指能够以多种方式将太阳能光伏发电系统输出的电能并联到电网上的逆变器。目前,多并网逆变器所需的数字化技术、高效功率转换技术和智能控制技术等方面都在迅速发展,逆变器本身的质量和性能也越来越高。但是,在实际应用中也存在一些问题,如逆变器的故障率高、容易受到恶劣环境的影响等。在太阳能光伏发电系统中,逆变器扮演着十分关键的角色,其正常工作的稳定性和可

主动式踝关节假肢的优化设计与阻抗控制的中期报告.docx
主动式踝关节假肢的优化设计与阻抗控制的中期报告为了满足截肢者的需求,越来越多的机构开始研发踝关节假肢。其中,主动式踝关节假肢由于具有更好的稳定性、更好的步态匹配和更好的行走效果,越来越受到人们的重视。本文介绍了一个主动式踝关节假肢的优化设计和阻抗控制的中期报告。首先,我们通过对截肢者的访谈和研究发现,主动式踝关节假肢需要具备以下特点:轻量化、稳定性高、装配简便、适应性强、兼具弯曲和伸直功能、易于控制以及具有低功耗等特点。因此,我们对设计方案进行了优化,同时考虑了生产成本和实际使用效果。其次,我们分别对踝关