
单目实时深度估计与三维重建的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单目实时深度估计与三维重建的开题报告.docx
单目实时深度估计与三维重建的开题报告一、研究背景随着机器视觉技术的不断发展,深度估计和三维重建技术得到越来越广泛的应用。同时,基于单目图像的实时深度估计和三维重建技术也日益受到研究者的关注。本课题旨在研究如何使用单目摄像头实现深度估计和三维重建,并探讨如何提高其实时性,以满足实际应用的需求。二、研究意义单目摄像头广泛应用于移动设备、智能家居、汽车自动驾驶等领域,因其便携、易用、成本低廉等优点。如果能够利用单目摄像头实现实时深度估计和三维重建,将能够给这些领域的应用带来很大的便利和更强大的功能。三、研究内容

单目实时深度估计与三维重建.docx
单目实时深度估计与三维重建标题:单目实时深度估计与三维重建引言:单目实时深度估计和三维重建是计算机视觉领域的热门研究课题。它们在许多应用领域中具有重要意义,包括增强现实、自动驾驶、机器人导航等。深度估计是计算机视觉任务的核心之一,它能够从单个图像中推断出场景中物体的距离信息。三维重建则是通过多个深度估计结果,将图像重建成三维场景模型。本文将讨论单目实时深度估计与三维重建的背景、方法、挑战和应用,并展望未来的发展方向。背景:随着传感器和计算能力的不断提升,单目实时深度估计和三维重建的研究在过去几十年中取得了

单目实时深度估计与三维重建的任务书.docx
单目实时深度估计与三维重建的任务书一、任务背景:随着智能摄像头、深度相机等成像设备的得到普及和发展,深度信息的获取和应用变得越来越重要。深度信息具有很强的空间信息,可以被广泛地用于三维建模、虚拟现实、人机交互等领域中,在无人驾驶、机器人视觉、医学影像等方向中也有广泛的应用。因此,单目实时深度估计与三维重建技术成为研究的热点之一。二、任务描述:本任务旨在探究单目实时深度估计与三维重建的技术,设计实现一种具有高准确性和实时性的深度估计与三维重建方法,并应用于物体跟踪、三维建模、虚拟现实等场景中。任务包括以下几
从单目内窥镜图像估计实时深度.pdf
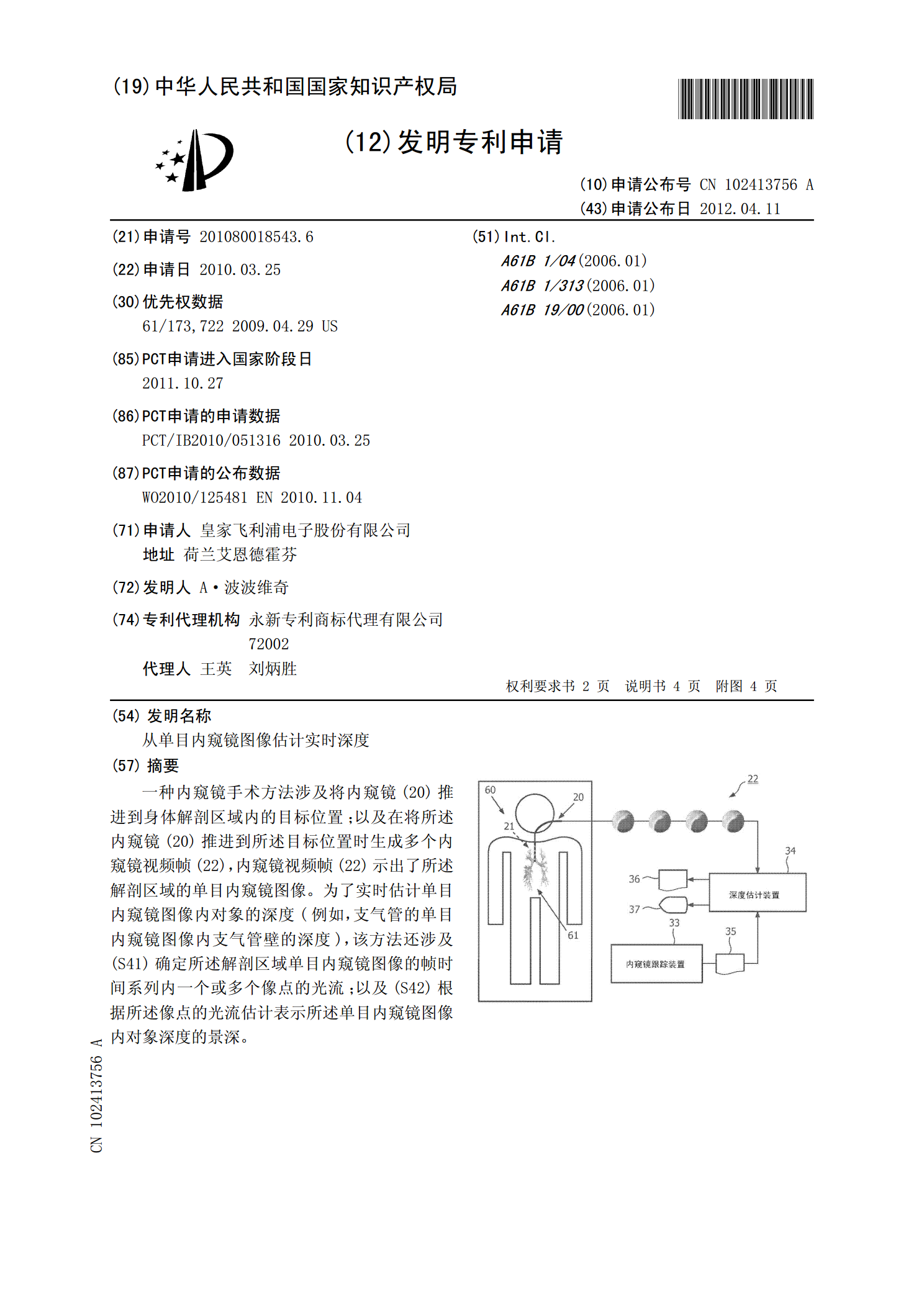
一种内窥镜手术方法涉及将内窥镜(20)推进到身体解剖区域内的目标位置;以及在将所述内窥镜(20)推进到所述目标位置时生成多个内窥镜视频帧(22),内窥镜视频帧(22)示出了所述解剖区域的单目内窥镜图像。为了实时估计单目内窥镜图像内对象的深度(例如,支气管的单目内窥镜图像内支气管壁的深度),该方法还涉及(S41)确定所述解剖区域单目内窥镜图像的帧时间系列内一个或多个像点的光流;以及(S42)根据所述像点的光流估计表示所述单目内窥镜图像内对象深度的景深。

基于深度学习的单目图像深度估计的开题报告.docx
基于深度学习的单目图像深度估计的开题报告一、选题背景单目图像深度估计是计算机视觉中的重要问题,它能够为自动驾驶、机器人导航以及虚拟现实等领域提供基础和支撑。传统的深度估计方法多依赖于手工设计的特征和先验知识,而深度学习技术的广泛应用使得基于数据驱动的单目图像深度估计成为可能。随着深度学习技术的不断发展,卷积神经网络(ConvolutionalNeuralNetwork,CNN)在深度估计中的应用也不断得到完善和拓展。CNN已经成为处理图像数据的重要工具,它可以对图像数据进行端到端的训练和直接推断,避免了对