
下肢外骨骼偏瘫助行机器人研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢外骨骼偏瘫助行机器人研究的开题报告.docx
下肢外骨骼偏瘫助行机器人研究的开题报告一、研究背景随着人口老龄化进程的加快,下肢肌无力和骨关节病变导致的偏瘫人数不断增加。传统的康复方式主要依靠理疗、功能训练等,效果受到许多因素影响。而现在,机器人技术的发展为偏瘫康复带来了新的解决方案。外骨骼技术是机器人技术中的一个分支,它是将机器人技术应用于医疗康复中的一种形式。外骨骼作为一种康复机器人,具有强大的支撑、抗阻力和行动能力,以及可扩展和可定制的特点,可以应用于下肢偏瘫患者的康复训练,改善患者的肢体功能,提高生活质量。二、研究内容本研究的目标是设计和研发一

下肢外骨骼偏瘫助行机器人研究的任务书.docx
下肢外骨骼偏瘫助行机器人研究的任务书一、研究背景随着人类生产力的不断提高,人们的生活环境和生活方式发生了极大的变化。而这也带来了新的挑战——人们需要长时间地坐在电脑前或是站在工作岗位上,这些都对人类的健康构成了巨大的威胁。这也导致了现代社会中少不了的一项问题——下肢偏瘫。下肢偏瘫是一种常见的神经系统疾病,其主要的病因是脑病、脊髓病和周围神经病。其表现为局部或全身肌肉发生瘫痪和无力感,使得患者很难行走,甚至无法独立生活。在人们的生活中,下肢偏瘫对于病患家庭和社会都造成了很大的压力和困扰。在医学领域,人们尝试

下肢助行外骨骼机器人的控制方法及外骨骼机器人.pdf
本发明提供了一种下肢助行外骨骼机器人的控制方法及外骨骼机器人,其中,控制方法,包括:检测腿部关节的角度;检测外骨骼机器人和用户的整体的质心的位置;检测步行过程中足底的压力,包括右腿足底承受的第一压力F
一种穿戴式下肢外骨骼助行机器人.pdf
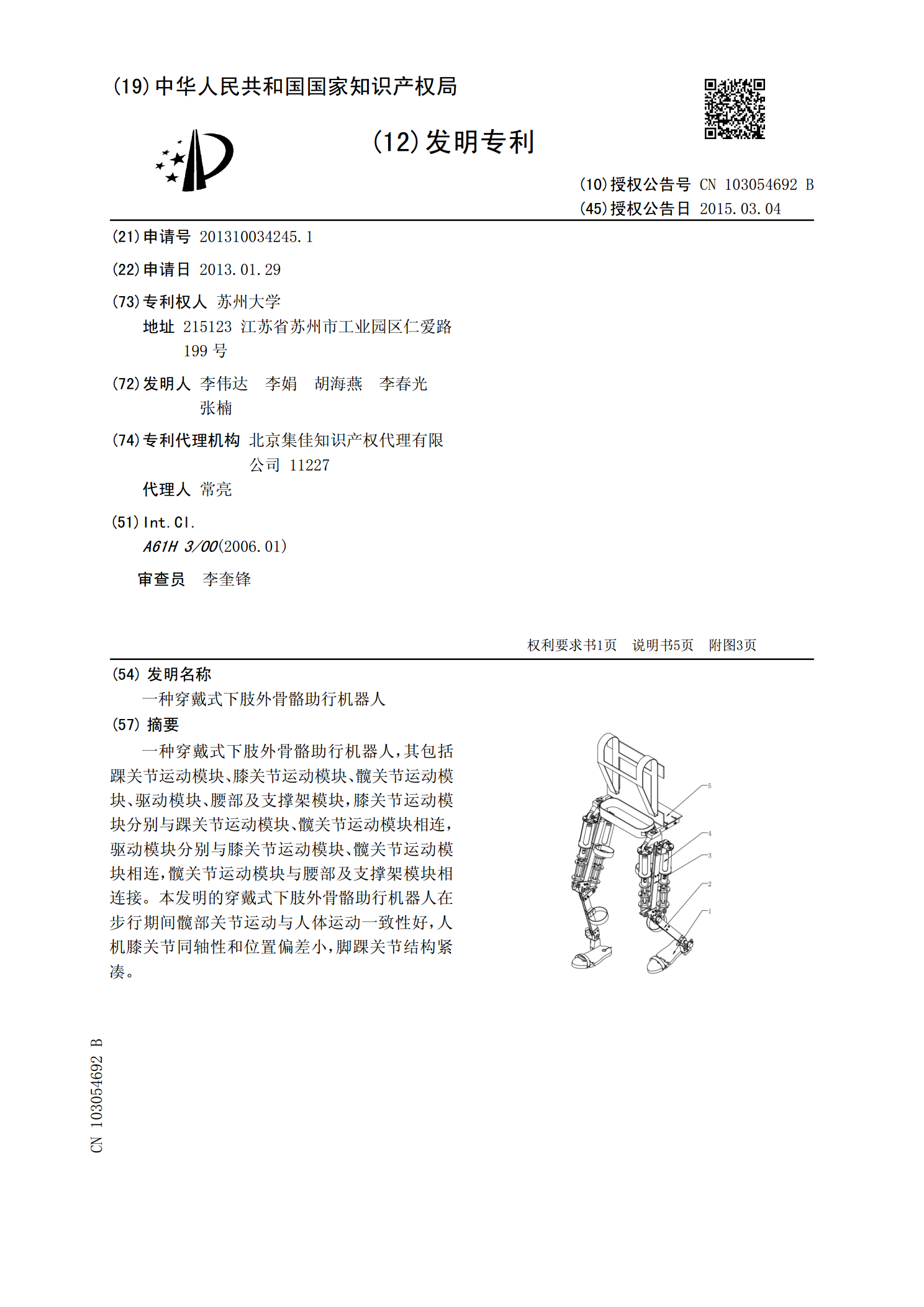
一种穿戴式下肢外骨骼助行机器人,其包括踝关节运动模块、膝关节运动模块、髋关节运动模块、驱动模块、腰部及支撑架模块,膝关节运动模块分别与踝关节运动模块、髋关节运动模块相连,驱动模块分别与膝关节运动模块、髋关节运动模块相连,髋关节运动模块与腰部及支撑架模块相连接。本发明的穿戴式下肢外骨骼助行机器人在步行期间髋部关节运动与人体运动一致性好,人机膝关节同轴性和位置偏差小,脚踝关节结构紧凑。

下肢外骨骼助行机器人驱动系统分析.docx
下肢外骨骼助行机器人驱动系统分析下肢外骨骼助行机器人是一种基于机械结构和电气控制系统的设备,旨在帮助下肢功能受损或丧失的人恢复或增强行走能力。其驱动系统是机器人的核心组成部分,直接影响其性能和应用效果。本文将从电动助力驱动、附加智能驱动、力矩控制、传感器和控制系统等方面对下肢外骨骼助行机器人的驱动系统进行分析。一、电动助力驱动电动助力驱动是下肢外骨骼助行机器人最常见的驱动方式之一。通过电动机驱动机器人的关节运动,提供行走的动力。电动助力驱动系统需要具备较高的功率输出和供电稳定性,以满足机器人在不同地形和行