
视距在园艺中的应用.pptx

骑着****猪猪

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

视距在园艺中的应用.pptx
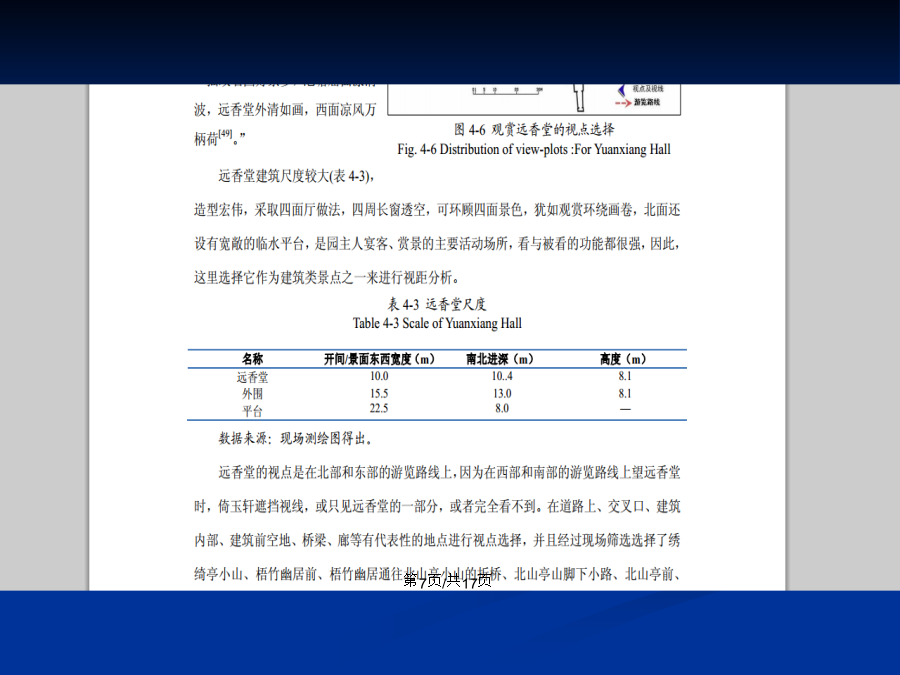
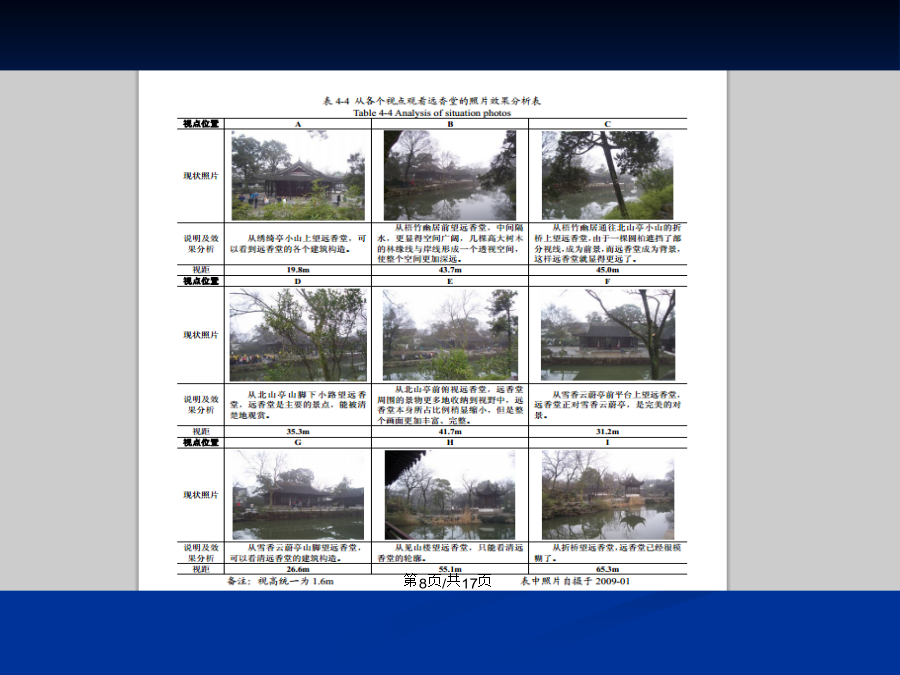
会计学//视距在园林中的应用正常情况下,不转动头,能看清景物的垂直视场为26°—30°,水平方向为45°,超此范围则需转头,否则对景物的整体构图或整体印象就不够完整,而且容易疲劳。根据以上视距和视域清晰范围,在园林景物中,垂直视域为30°时,其合适的观赏视距为D=3.7(H—h)。粗略估计,大型景物的合适观赏视距约为景物高度的3.3倍,小型景物的合适观赏视距约为景物高度的3倍。水平视域为45°时,其合适的观赏视距为:D=1.2W。所以合适的观赏视距是1.2倍。观赏点的布置最好能因高就低,位置错落,或登高(

伪视距测量方法在矿山测量中的应用.docx
伪视距测量方法在矿山测量中的应用随着矿山开采技术的不断发展,矿山测量工作也得到了更广泛的应用。在矿山测量中,伪视距测量方法是一种常用的测量方法,它不仅精度高、速度快,而且操作简单,因此在矿山测量中广泛应用。本文将探讨伪视距测量方法在矿山测量中的应用,包括伪视距测量方法的基本原理、优势以及在矿山测量中的应用实例。一、伪视距测量方法基本原理伪视距测量方法是利用三角形相似原理进行距离测量的一种方法。它的基本原理是:在矿山测量中,利用望远镜观测测站(或测点)和待测点所连成的两条直线(即测站线和待测线),记录下两条

改进UKF算法在天波超视距雷达中的应用.docx
改进UKF算法在天波超视距雷达中的应用Title:ImprovingtheApplicationoftheUnscentedKalmanFilterAlgorithminBeyondLine-of-SightRadarSystemsAbstract:BeyondLine-of-Sight(BLOS)radarsystems,suchastheover-the-horizonorskywaveradar,playavitalroleinlong-rangetargetdetectionandtracking

脉冲频率编码信号在高频地波超视距雷达中的应用.docx
脉冲频率编码信号在高频地波超视距雷达中的应用脉冲频率编码(PulseFrequencyModulation,PFM)是一种常用的调制技术,其应用广泛,包括在高频地波超视距雷达中。本文将探讨脉冲频率编码信号在高频地波超视距雷达中的应用,并讨论其优势和限制。高频地波超视距雷达是一种用于监测大范围区域的雷达系统,其工作频率通常在3-30MHz范围内,具有较长的波长和较远的传播距离。脉冲频率编码信号在该雷达系统中的应用主要体现在增强其抗多径干扰能力和提供更高的测量精度。首先,脉冲频率编码信号能够有效降低多径干扰对

一种改进UKF算法在超视距雷达中的应用.docx
一种改进UKF算法在超视距雷达中的应用摘要:UKF(UnscentedKalmanFilter)算法是一种重要的非线性滤波算法,常用于处理复杂的非线性系统。本文旨在将UKF算法应用于超视距雷达中,对该算法进行改进,以提高在跟踪目标中的准确度和稳定性。首先,本文对超视距雷达的原理和UKF算法的基本原理进行了简单介绍,并详细分析了UKF算法的特性和不足。在此基础上,本文提出了一种基于改进UKF算法的超视距雷达目标跟踪方法。改进UKF算法主要在计算Kalman增益矩阵和观测方程中进行了优化。在计算Kalman增