
《智能网联汽车:激光与视觉SLAM详解》随笔.docx

18****28


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共45页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

《智能网联汽车:激光与视觉SLAM详解》随笔.docx
《智能网联汽车:激光与视觉SLAM详解》读书随笔目录一、内容描述................................................21.1背景介绍.............................................31.2智能网联汽车的发展趋势...............................4二、激光SLAM技术............................................62.1激光SLAM的基本原理......

智能网联汽车阅读随笔.docx
《智能网联汽车》阅读随笔一、智能网联汽车的基本概念随着科技的飞速发展和数字化转型的浪潮,智能网联汽车成为了当今社会的热门话题。智能网联汽车,是融合了信息技术与网络技术,实现汽车智能化、网络化运行的新型汽车。这个概念涵盖了诸多领域的技术融合与创新,包括但不限于自动驾驶技术、通信技术、人工智能等。智能网联汽车的核心在于智能化,智能化体现在汽车能够自主感知周围环境,并根据获取的信息做出判断与决策。这依赖于先进的传感器、高精度定位系统等设备,它们能够实时收集车辆周围的各种数据,如道路状况、车辆位置、交通信号等。通
一种基于激光与视觉SLAM融合的智能轮椅.pdf
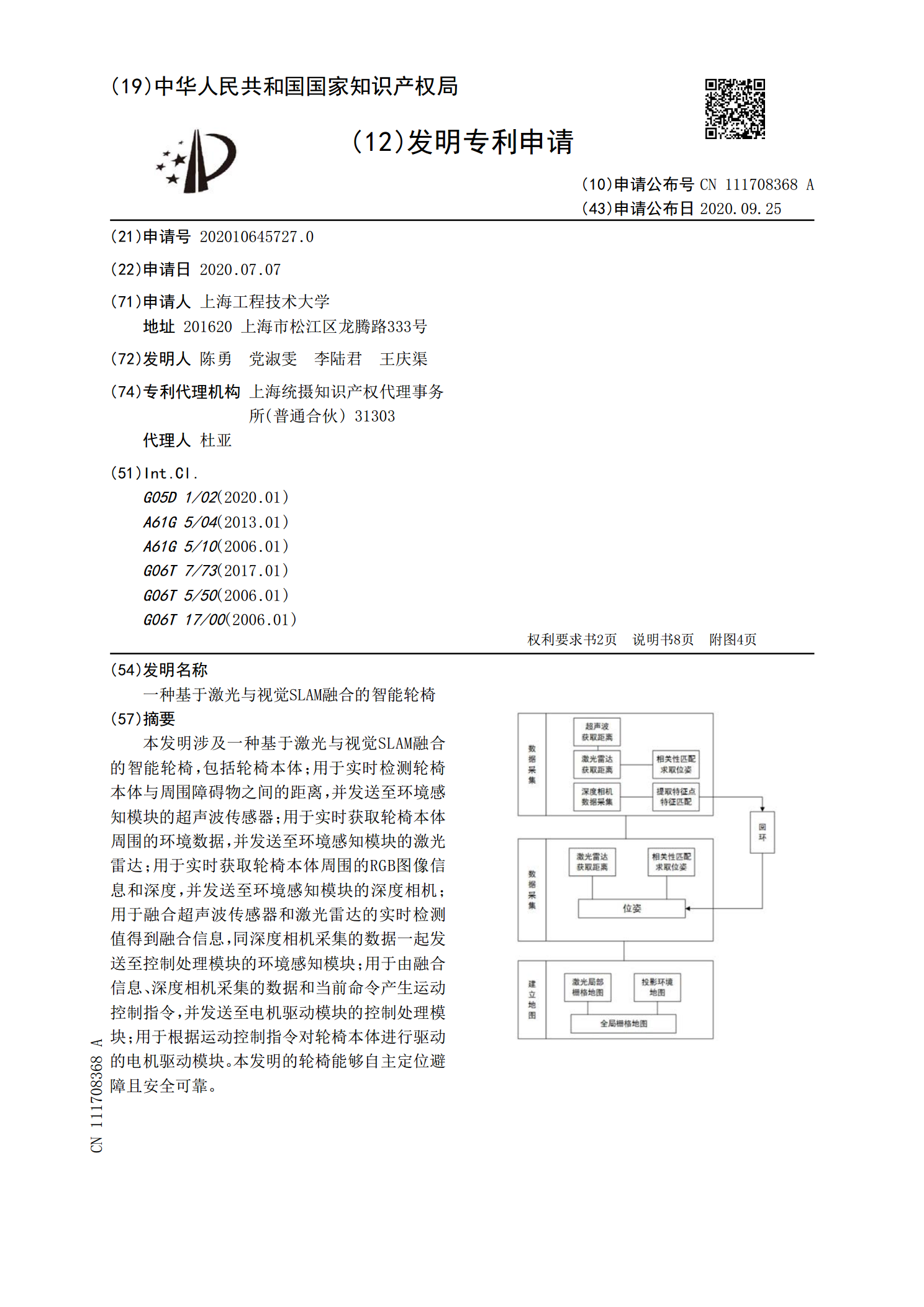
本发明涉及一种基于激光与视觉SLAM融合的智能轮椅,包括轮椅本体;用于实时检测轮椅本体与周围障碍物之间的距离,并发送至环境感知模块的超声波传感器;用于实时获取轮椅本体周围的环境数据,并发送至环境感知模块的激光雷达;用于实时获取轮椅本体周围的RGB图像信息和深度,并发送至环境感知模块的深度相机;用于融合超声波传感器和激光雷达的实时检测值得到融合信息,同深度相机采集的数据一起发送至控制处理模块的环境感知模块;用于由融合信息、深度相机采集的数据和当前命令产生运动控制指令,并发送至电机驱动模块的控制处理模块;用于
智能网联汽车关键技术—激光雷达.pdf
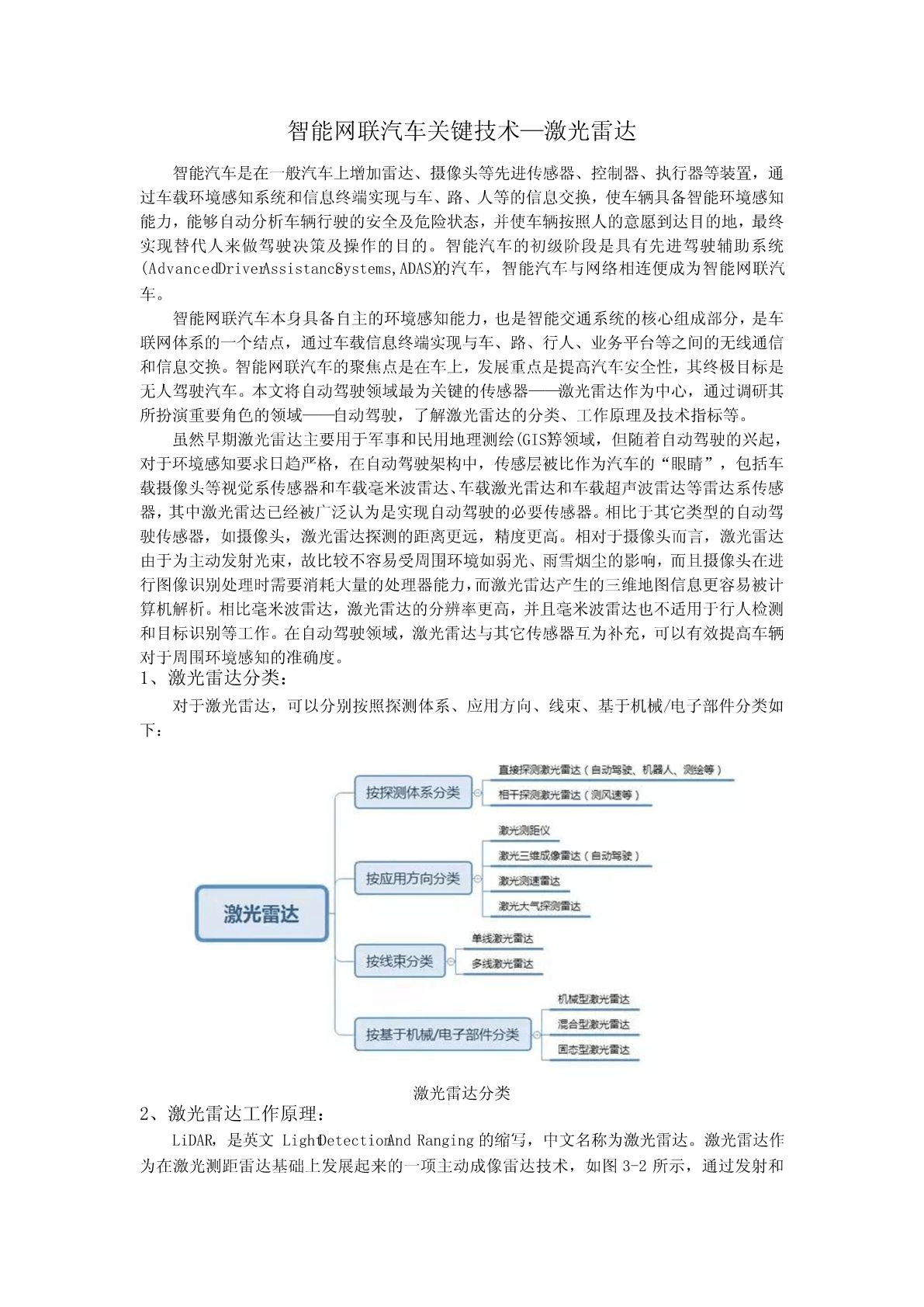
智能网联汽车关键技术—激光雷达智能汽车是在一般汽车上增加雷达、摄像头等先进传感器、控制器、执行器等装置,通过车载环境感知系统和信息终端实现与车、路、人等的信息交换,使车辆具备智能环境感知能力,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实现替代人来做驾驶决策及操作的目的。智能汽车的初级阶段是具有先进驾驶辅助系统(AdvancedDriverAssistanceSystems,ADAS)的汽车,智能汽车与网络相连便成为智能网联汽车。智能网联汽车本身具备自主的环境感知能力,也是智

SLAM技术分类有哪些_激光SLAM与视觉SLAM比较分析.docx
SLAM技术分类有哪些_激光SLAM与视觉SLAM比较分析1.SLAM技术分类根据移动机器人搭载的传感器不同,可以将SLAM分为激光SLAM和视觉SLAM,为了更好地适应环境,目前还出现了多传感器融合的SLAM。(1)激光SLAM激光SLAM搭载的是2D或3D激光雷达,根据所处的不同环境特点来选择适合的激光雷达。考虑到部分室内环境相对简单和对移动机器人的功能要求较低,移动机器人可选择2D激光雷达;而当室内环境因素多变且更为复杂时,移动机器人多采用3D激光雷达来动态扫描三维空间。(2)视觉SLAM视觉SLA