
一种基于单目视觉系统的多尺度空-地参数自动标定方法.pdf

贤惠****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于单目视觉系统的多尺度空-地参数自动标定方法.pdf
本发明提出了一种基于单目视觉的小型飞行器多尺度空-地参数自动标定方法。本发明以自制的由深色纸板拼接成的标定板为标定工具,经过二值化、边缘提取、轮廓查找、轮廓最小外接矩形计算、噪声过滤等一系列处理算法,从采集的图像数据中提取出属于标定板的特征点,得到实际距离与像素个数的比值,并结合气压计测得的飞机飞行高度,用光滑的曲线将这些点连接起来,最终得到空-地多参数关系的函数曲线。本发明创新点在于采用深色卡纸作为标定设备,可快速实现飞行器飞行高度、地面物体几何参数、图像分辨率三个相互关联的空-地参数的在线标定,为多传

基于单目视觉的GPS辅助相机外参数标定.docx
基于单目视觉的GPS辅助相机外参数标定基于单目视觉的GPS辅助相机外参数标定摘要:相机外参数标定是计算机视觉中的重要问题之一,它用于确定相机的位置和朝向,为视觉定位和导航提供基础。本文提出了一种基于单目视觉的GPS辅助相机外参数标定方法。通过使用GPS设备获取相机在三维空间中的位置信息,并结合视觉特征提取和匹配算法,实现了相机外参数的准确标定。实验结果表明,该方法能够有效地提高相机外参数标定的精度和鲁棒性。关键词:相机外参数标定,单目视觉,GPS辅助,特征匹配1.引言相机外参数标定是计算机视觉中一个重要的
一种基于单目视觉的自动测量系统及测量方法.pdf
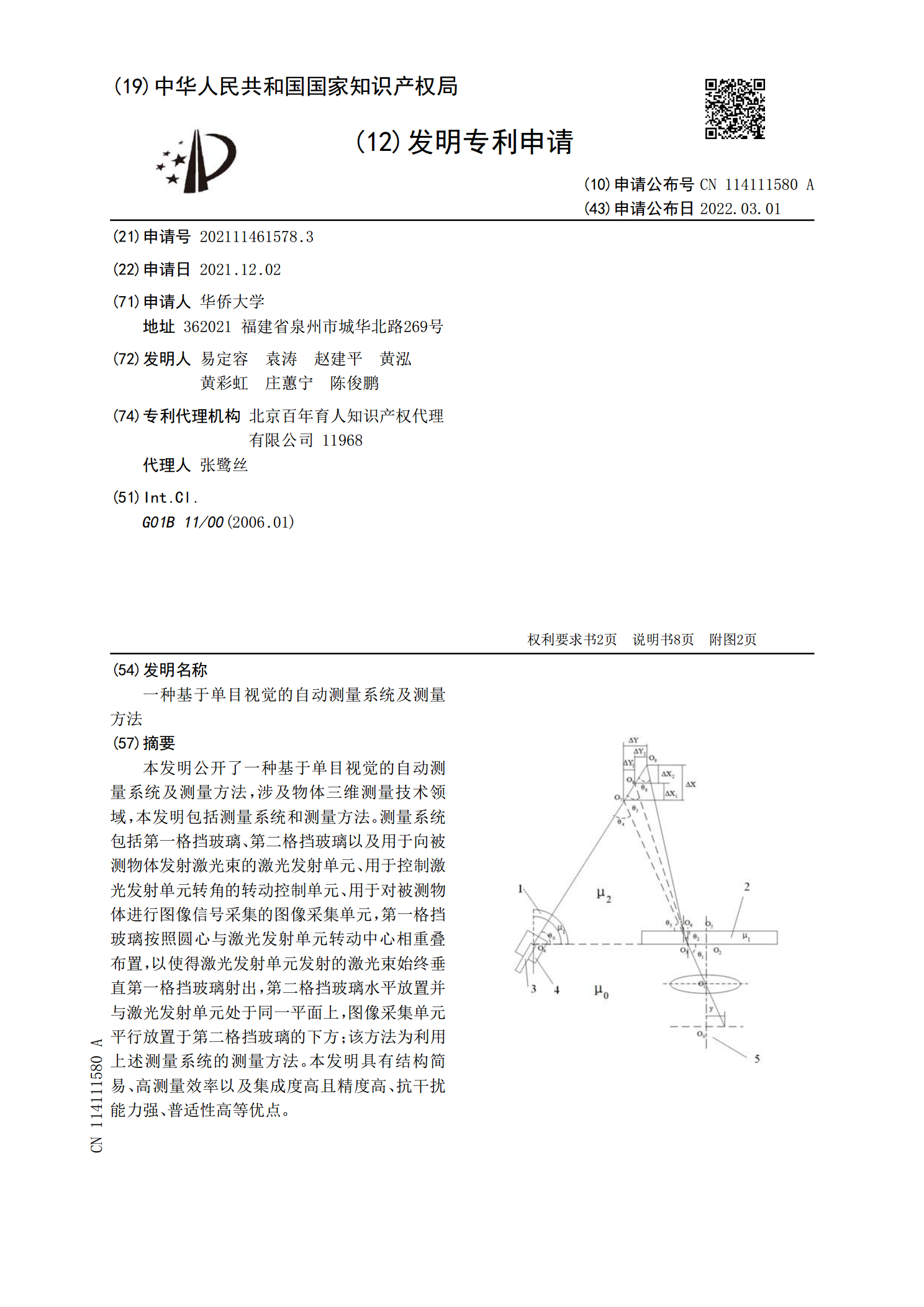
本发明公开了一种基于单目视觉的自动测量系统及测量方法,涉及物体三维测量技术领域,本发明包括测量系统和测量方法。测量系统包括第一格挡玻璃、第二格挡玻璃以及用于向被测物体发射激光束的激光发射单元、用于控制激光发射单元转角的转动控制单元、用于对被测物体进行图像信号采集的图像采集单元,第一格挡玻璃按照圆心与激光发射单元转动中心相重叠布置,以使得激光发射单元发射的激光束始终垂直第一格挡玻璃射出,第二格挡玻璃水平放置并与激光发射单元处于同一平面上,图像采集单元平行放置于第二格挡玻璃的下方;该方法为利用上述测量系统的测

一种基于多尺度注意力约束的目标定位方法及系统.pdf
本发明涉及一种基于多尺度注意力约束的目标定位方法及系统,方法包括:对训练图片进行数据增广和缩放,得到多张不同尺度的输入图片;根据输入图片利用神经网络进行预测分类,得到分类类别;根据分类类别确定交叉熵损失函数;对多张不同尺度的输入图片进行融合,确定多张不同尺度的类激活图;根据多张不同尺度的类激活图确定注意力的散度损失函数和定位结果;以多张不同尺度的输入图片为输入,以分类类别为输出,以交叉熵损失函数和散度损失函数为损失函数,利用随机梯度下降法对神经网络的参数进行训练,得到训练好的神经网络;将测试图片输入训练好

基于单目视觉的水面船舶多目标定位方法.docx
基于单目视觉的水面船舶多目标定位方法摘要:水面船舶定位是航运行业和海洋资源开发的重要应用,而多目标测量和定位又是其中的关键技术之一。本文基于单目视觉,提出一种水面船舶多目标定位方法。该方法利用摄像头获取的船舶影像进行特征提取和目标定位,可实现多船舶同时定位,可靠性和稳定性良好。最后通过实验验证该方法的有效性。关键词:单目视觉;水面船舶;多目标定位;特征提取;目标定位。一、引言水面船舶定位通常指的是在船舶运行过程中,通过各种手段实现对船舶的位置和速度的测量。目前,水面船舶的定位需要结合多种技术和手段,如GP