
摄影测量实验报告(空间后方交会—前方交会).docx

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
摄影测量实验报告(空间后方交会—前方交会).docx
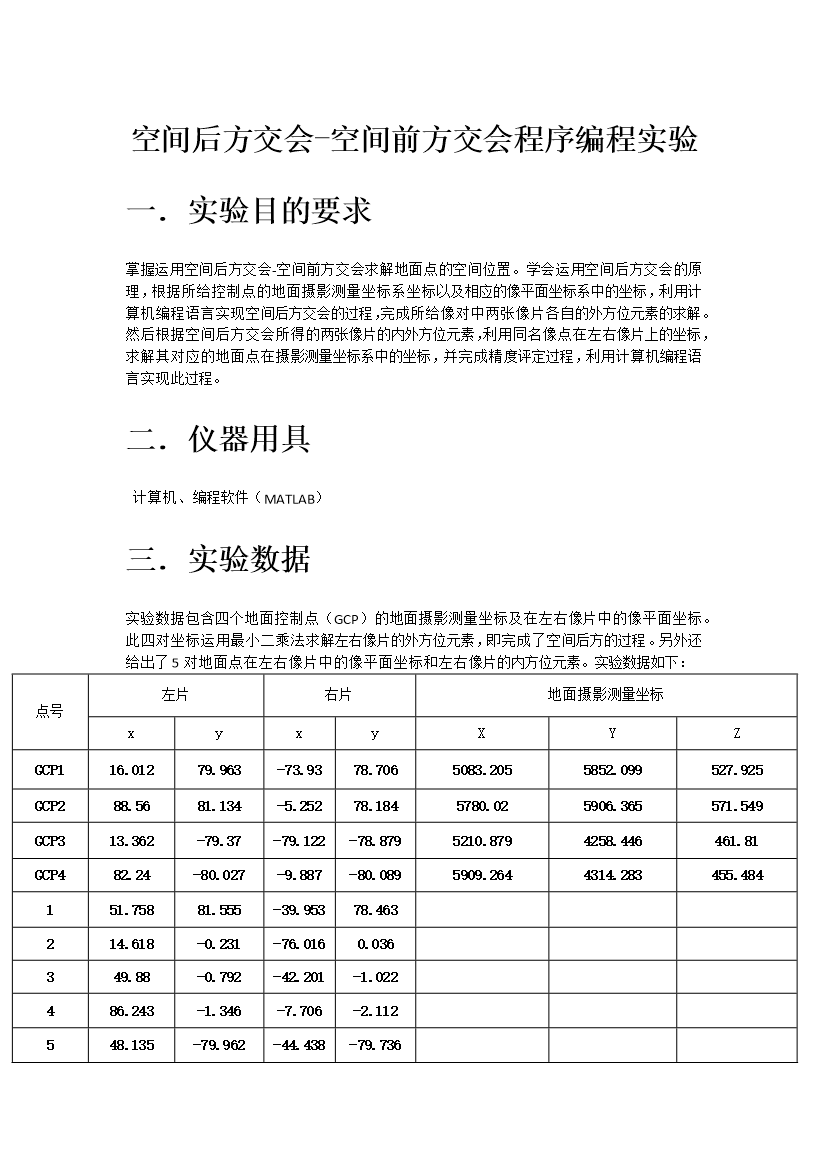
空间后方交会-空间前方交会程序编程实验实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置。学会运用空间后方交会的原理根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标利用计算机编程语言实现空间后方交会的过程完成所给像对中两张像片各自的外方位元素的求解。然后根据空间后方交会所得的两张像片的内外方位元素利用同名像点在左右像片上的坐标求解其对应的地面点在摄影测量坐标系中的坐标并完成精度评定过程利用计算机编程语言实现此过程。仪器用具计算机、编程软件(MATLAB)实验数据实验数
摄影测量实验报告(空间后方交会—前方交会).docx
空间后方交会-空间前方交会程序编程实验实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置。学会运用空间后方交会的原理根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标利用计算机编程语言实现空间后方交会的过程完成所给像对中两张像片各自的外方位元素的求解。然后根据空间后方交会所得的两张像片的内外方位元素利用同名像点在左右像片上的坐标求解其对应的地面点在摄影测量坐标系中的坐标并完成精度评定过程利用计算机编程语言实现此过程。仪器用具计算机、编程软件(MATLAB)实验数据实验数

前方后方空间交会实验报告.docx
前方后方空间交会实验报告中南大学本科生课程设计(实践)任务书、设计报告(摄影测量与遥感概论)题目空间后方-前方交会学生姓名指导教师邹峥嵘学院地球科学与信息物理学院专业班级测绘0902班学生学号一、实验目的通过对数字影像空间后交前交的程序设计实验,要求我们进一步理解和掌握影像外方位元素的有关理论、原理和方法。利用计算机程序设计语言编写摄影测量空间交会软件进行快速确定影像的外方位元素及其精度,然后通过求得的外方位元素求解未知点的地面摄影测量坐标,达到通过摄影测量量测地面地理数据的目的。二、实验要求用C、VB或

前方后方空间交会实验报告.pdf
前方后方空间交会实验报告--前方后方空间交会实验报告中南大学本科生课程设计(实践)任务书、设计报告(摄影测量与遥感概论)题目学生姓名指导教师空间后方-前方交会邹峥嵘学院地球科学与信息物理学院专业班级学生学号

摄影测量单片空间后方交会程序C.docx
输入文件形式如下:C++源程序如下:#include<iostream>#include<fstream>#include<cmath>#include<string>#include<iomanip>usingnamespacestd;constintn=6;voidinverse(doublec[n][n]);template<typenameT1,typenameT2>voidtranspose(T1*mat1,T2*mat2,inta,intb);template<typenameT1,typen