
用MATLAB实现共轭梯度法求解实例.pdf

英瑞****写意


1/7

2/7

3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用MATLAB实现最速下降法,牛顿法和共轭梯度法求解实例.pdf
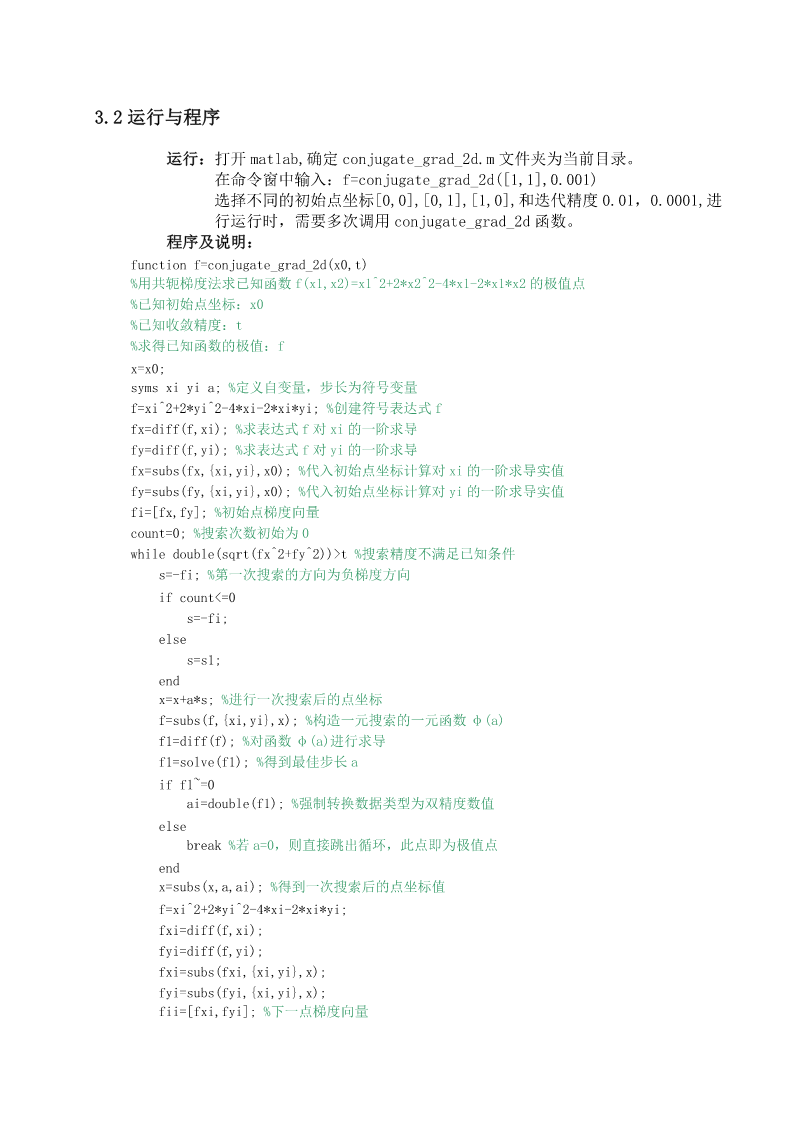
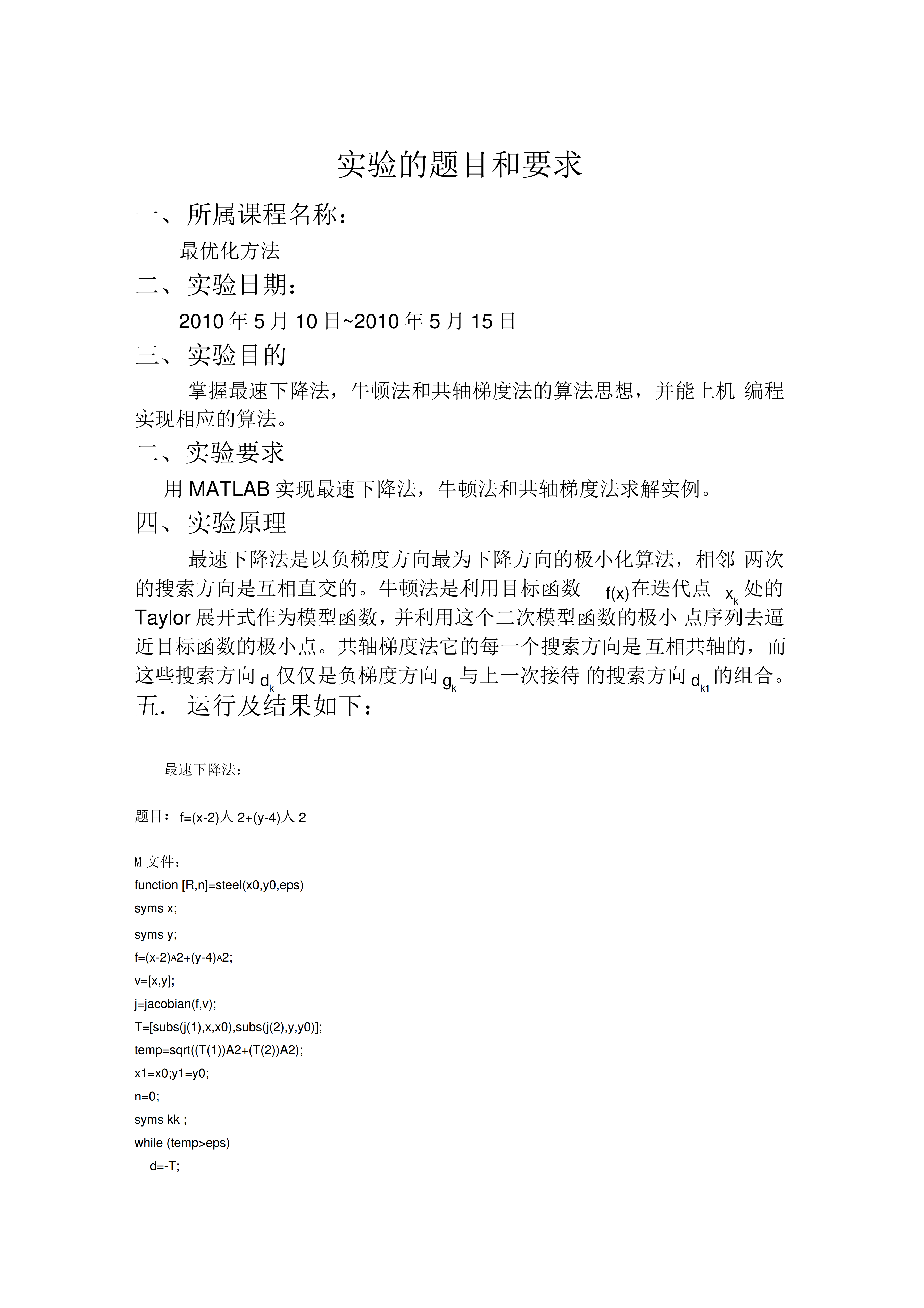
实验的题目和要求一、所属课程名称:最优化方法二、实验日期:2010年5月10日~2010年5月15日三、实验目的掌握最速下降法牛顿法和共轴梯度法的算法思想并能上机编程实现相应的算法。二、实验要求用MATLAB实现最速下降法牛顿法和共轴梯度法求解实例。四、实验原理最速下降法是以负梯度方向最为下降方向的极小化算法相邻两次的搜索方

用MATLAB实现最速下降法-牛顿法和共轭梯度法求解实例.doc
实验的题目和要求所属课程名称:最优化方法实验日期:实验目的掌握最速下降法,牛顿法和共轭梯度法的算法思想,并能上机编程实现相应的算法。二、实验要求用MATLAB实现最速下降法,牛顿法和共轭梯度法求解实例。四、实验原理最速下降法是以负梯度方向最为下降方向的极小化算法,相邻两次的搜索方向是互相直交的。牛顿法是利用目标函数在迭代点处的Taylor展开式作为模型函数,并利用这个二次模型函数的极小点序列去逼近目标函数的极小点。共轭梯度法它的每一个搜索方向是互相共轭的,而这些搜索方向仅仅是负梯度方向与上一次接待的搜索方

(完整word版)用MATLAB实现最速下降法-牛顿法和共轭梯度法求解实例.doc
实验的题目和要求所属课程名称:最优化方法实验日期:实验目的掌握最速下降法,牛顿法和共轭梯度法的算法思想,并能上机编程实现相应的算法。二、实验要求用MATLAB实现最速下降法,牛顿法和共轭梯度法求解实例。四、实验原理最速下降法是以负梯度方向最为下降方向的极小化算法,相邻两次的搜索方向是互相直交的。牛顿法是利用目标函数在迭代点处的Taylor展开式作为模型函数,并利用这个二次模型函数的极小点序列去逼近目标函数的极小点。共轭梯度法它的每一个搜索方向是互相共轭的,而这些搜索方向仅仅是负梯度方向与上一次接待的搜索方

(完整word版)用MATLAB实现最速下降法-牛顿法和共轭梯度法求解实例.doc
实验的题目和要求所属课程名称:最优化方法实验日期:实验目的掌握最速下降法,牛顿法和共轭梯度法的算法思想,并能上机编程实现相应的算法。二、实验要求用MATLAB实现最速下降法,牛顿法和共轭梯度法求解实例。四、实验原理最速下降法是以负梯度方向最为下降方向的极小化算法,相邻两次的搜索方向是互相直交的。牛顿法是利用目标函数在迭代点处的Taylor展开式作为模型函数,并利用这个二次模型函数的极小点序列去逼近目标函数的极小点。共轭梯度法它的每一个搜索方向是互相共轭的,而这些搜索方向仅仅是负梯度方向与上一次接待的搜索方

求解无约束优化问题的共轭梯度法.doc
(完整word)求解无约束优化问题的共轭梯度法(完整word)求解无约束优化问题的共轭梯度法(完整word)求解无约束优化问题的共轭梯度法求解无约束优化问题的共轭梯度法李芳梅,姚瑞哲指导教师:李良摘要:本文主要针对无约束优化问题,利用共轭梯度法(CG方法)求解此类问题,并得出其迭代次数及问题的解。论文对此种方法给出了具体事例,并对例子进行了matlab软件实现。1.引言共轭梯度法时介于最速下降法与牛顿法之间的一个方法。它仅需利用一阶导数信息,但克服了最速下降法收敛慢的缺点,又避免了牛顿法需要存储和计算He