
一种智能地面清洁机器人.pdf

fu****级甜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能地面清洁机器人.pdf
本发明涉及一种智能地面清洁机器人,包括车体、超声雷达、激光雷达、电路系统和驾驶座;所述车体的前轮连接直行电机和转向电机;所述激光雷达设于车体前端,安装高度离地200~300mm;超声传感器为设于车体前端和尾端的多个,安装高度离地400~500mm,超声传感器的超声波信号包线距离地面的最小距离小于等于100mm;所述驾驶座包括油门刹车踏板、座椅和方向盘;所述油门刹车踏板和方向盘电连接至电路系统。本发明的有益效果是:本发明在大面积需要清洁的环境中进行地面清洁任务时,可以有效解放人力资源、降低清洁工人的劳动强度

一种智能地面清洁机器人.pdf
本发明公开了一种智能地面清洁机器人,包括底板、驱动系统、洗刷系统、刮水系统、控制系统、水循环系统和用于安装部件的总架,刮水系统包括真空吸水机、吸水耙本体和吸水耙升降装置,吸水耙升降装置包括安装座,安装座与底板相连接,安装座与吸水耙本体通过连杆机构相连接,安装座与连杆机构之间设有回位机构,吸水耙本体上设有真空吸水机相连通的污水管,吸水耙本体具有在真空吸水机的作用下吸附在地面上的第一状态以及真空吸水机停止工作后在回位机构的作用下脱离地面的第二状态,回位机构包括与连杆机构活动连接的回位杆以及带动回位杆转动的弹性
一种智能地面清洁器.pdf
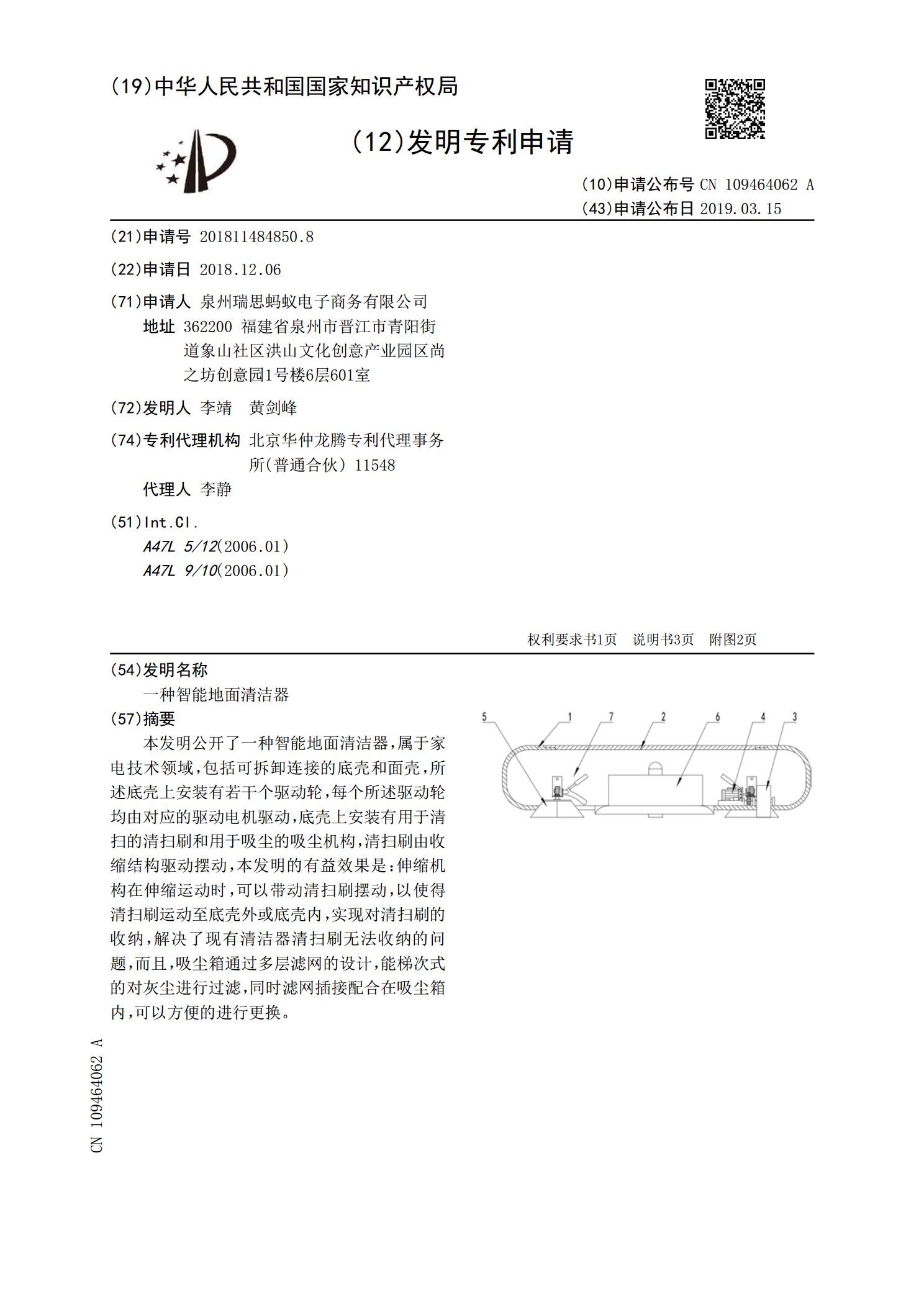
本发明公开了一种智能地面清洁器,属于家电技术领域,包括可拆卸连接的底壳和面壳,所述底壳上安装有若干个驱动轮,每个所述驱动轮均由对应的驱动电机驱动,底壳上安装有用于清扫的清扫刷和用于吸尘的吸尘机构,清扫刷由收缩结构驱动摆动,本发明的有益效果是:伸缩机构在伸缩运动时,可以带动清扫刷摆动,以使得清扫刷运动至底壳外或底壳内,实现对清扫刷的收纳,解决了现有清洁器清扫刷无法收纳的问题,而且,吸尘箱通过多层滤网的设计,能梯次式的对灰尘进行过滤,同时滤网插接配合在吸尘箱内,可以方便的进行更换。

智能机器人清洁地面的方法和芯片以及清洁机器人.pdf
本发明涉及一种智能机器人清洁地面的方法和芯片以及清洁机器人,机器人通过采用夹角直边与沿边结合的方式圈定一个待清洁区域,对该区域遍历清洁结束后,再通过同样的方式,圈定下一个待清洁区域,然后继续进行遍历清洁。以此类推,完成所有区域的遍历清洁。这些清洁方式,以机器人的起点为圆心,将待清洁区域划分为几个小区域,以小区域为单元进行遍历清洁,这种方式比较适合于单个区间的清洁,可以提高机器人的清洁效率和用户体验。此外,机器人采用这种方式还可以避免遗留清洁一些入口较小的区域。
一种智能制造车间用地面清洁装置.pdf
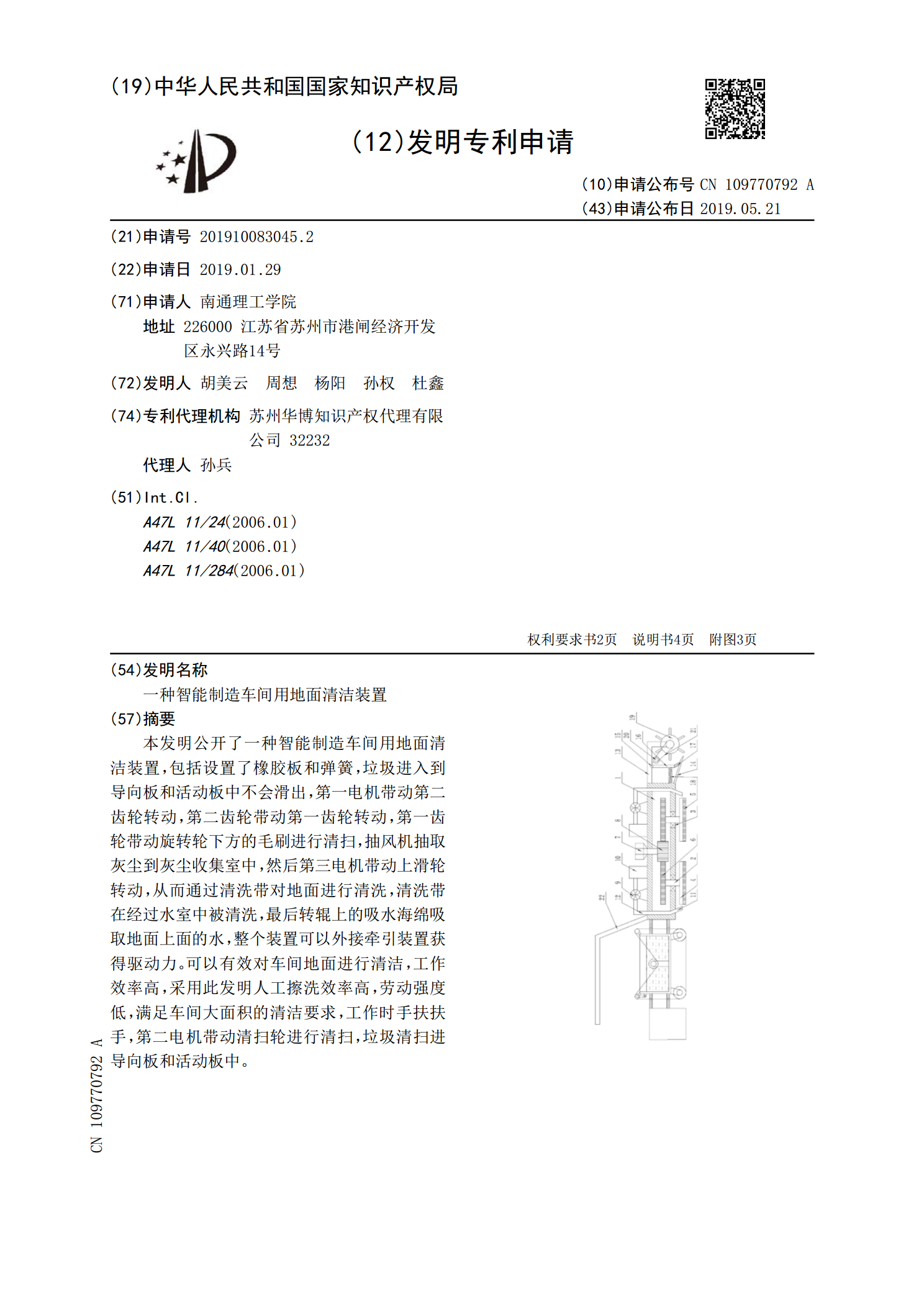
本发明公开了一种智能制造车间用地面清洁装置,包括设置了橡胶板和弹簧,垃圾进入到导向板和活动板中不会滑出,第一电机带动第二齿轮转动,第二齿轮带动第一齿轮转动,第一齿轮带动旋转轮下方的毛刷进行清扫,抽风机抽取灰尘到灰尘收集室中,然后第三电机带动上滑轮转动,从而通过清洗带对地面进行清洗,清洗带在经过水室中被清洗,最后转辊上的吸水海绵吸取地面上面的水,整个装置可以外接牵引装置获得驱动力。可以有效对车间地面进行清洁,工作效率高,采用此发明人工擦洗效率高,劳动强度低,满足车间大面积的清洁要求,工作时手扶扶手,第二电机