
基于人工蜂群算法的机器人路径规划的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于人工蜂群算法的机器人路径规划的中期报告.docx
基于人工蜂群算法的机器人路径规划的中期报告一、研究背景和意义随着机器人技术的不断发展和应用领域的逐步扩展,机器人的路径规划问题越来越受到关注。机器人的路径规划可以看作是在二维空间或者三维空间中寻找一条从起点到终点合法且最优的路径。路径规划在机器人系统中是一个非常重要的环节,目的是为机器人提供安全可靠的路径相应地行走。随着机器人数量的不断增加,路径规划的计算量也逐渐增加,因此需要一种高效的算法来解决该问题。人工蜂群算法是一种基于蜜蜂的社会行为的进化算法,具有全局收敛性、鲁棒性、适应性强等优点,在解决多维优化

基于人工蜂群算法的机器人路径规划.docx
基于人工蜂群算法的机器人路径规划摘要人工蜂群算法(ABC)是一种新兴的群体智能算法,它模拟了蜜蜂的行为和智能。在本文中,我们将介绍如何应用人工蜂群算法进行机器人路径规划。基于人工蜂群算法的机器人路径规划方法具有许多优点,例如:快速收敛、自适应性强、对于多目标优化问题具有很好的鲁棒性等。我们将通过详细介绍算法的原理、流程和实现过程,以及对比实验结果来证明该方法的有效性。关键词:人工蜂群算法,机器人路径规划,优化算法,群体智能,多目标优化引言路径规划是机器人领域中的重要研究内容之一,目的是寻找从起点到终点的最

基于人工蜂群算法的双机器人路径规划分析.docx
基于人工蜂群算法的双机器人路径规划分析人工蜂群算法是一种模拟行为蜜蜂觅食过程的进化算法,其可以用于求解优化问题。在双机器人路径规划中,我们可以利用人工蜂群算法来解决该问题。在双机器人路径规划中,我们需要确定两个机器人的路径并使它们尽可能地避免碰撞,同时最小化路径长度。人工蜂群算法可以通过迭代搜索方法来优化这个多目标优化问题。首先,我们需要定义问题的目标函数。可以将目标函数分为两个部分,一部分是路径长度,另一部分是机器人之间的碰撞次数。目标函数可以形式化地表示为:F=w*L+(1-w)*C其中,F是目标函数
基于多目标人工蜂群算法的多机器人路径规划方法.pdf
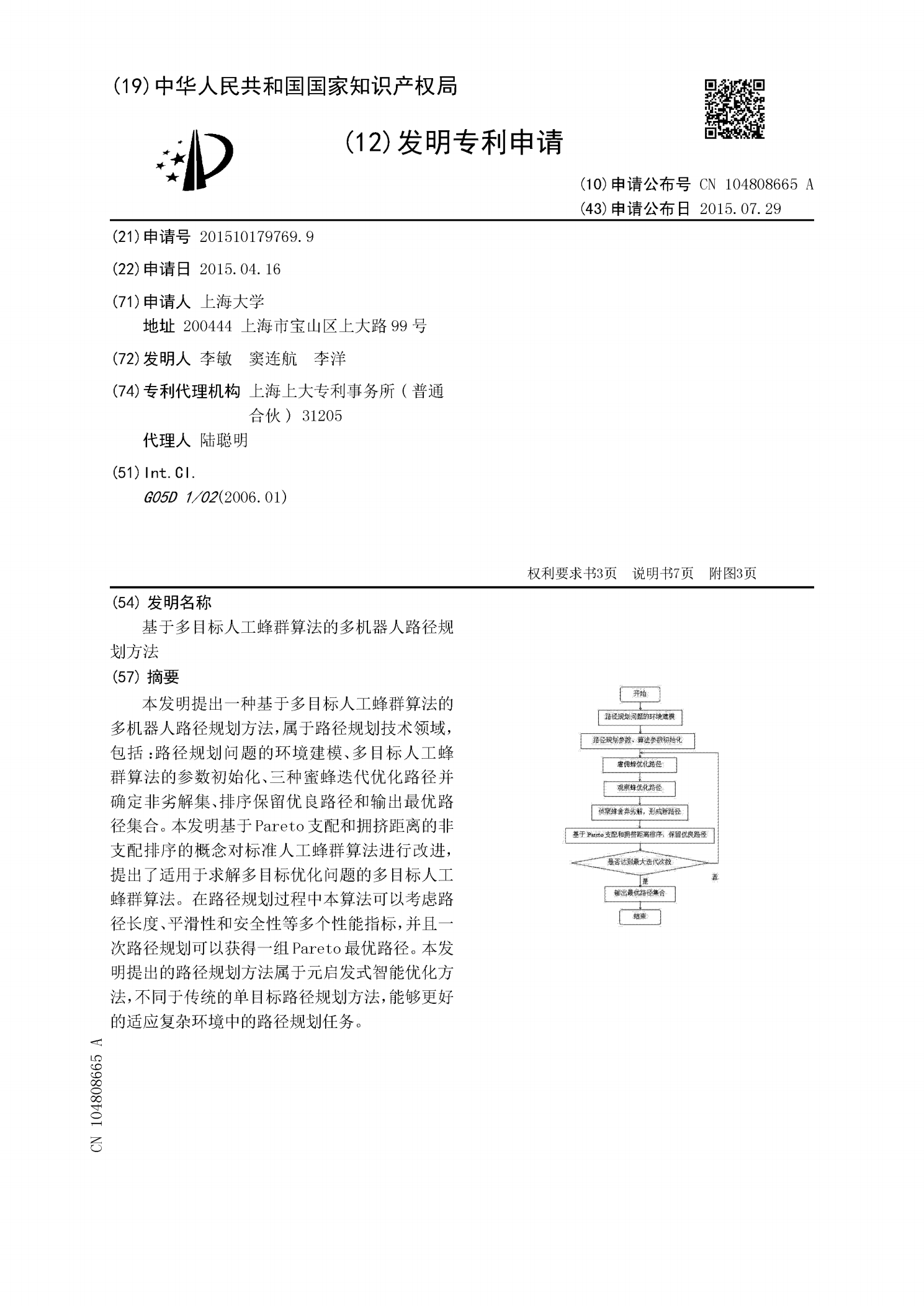
本发明提出一种基于多目标人工蜂群算法的多机器人路径规划方法,属于路径规划技术领域,包括:路径规划问题的环境建模、多目标人工蜂群算法的参数初始化、三种蜜蜂迭代优化路径并确定非劣解集、排序保留优良路径和输出最优路径集合。本发明基于Pareto支配和拥挤距离的非支配排序的概念对标准人工蜂群算法进行改进,提出了适用于求解多目标优化问题的多目标人工蜂群算法。在路径规划过程中本算法可以考虑路径长度、平滑性和安全性等多个性能指标,并且一次路径规划可以获得一组Pareto最优路径。本发明提出的路径规划方法属于元启发式智能

基于蜂群算法的煤矿救灾机器人全局路径规划.docx
基于蜂群算法的煤矿救灾机器人全局路径规划基于蜂群算法的煤矿救灾机器人全局路径规划摘要:煤矿救灾机器人在矿井救援中具有重要的作用,而全局路径规划是机器人实现高效自主导航的关键。因此,本文基于蜂群算法,提出一种用于煤矿救灾机器人全局路径规划的方法。通过建立煤矿环境模型,将蜂群算法应用于路径规划过程中,并通过实验验证了该方法的有效性。关键词:煤矿救灾机器人;全局路径规划;蜂群算法;环境模型1.引言煤矿事故频发,救援工作面临严峻的挑战。煤矿救灾机器人因其能在危险的环境中执行任务而备受关注。然而,机器人在救援过程中