
工业机器人现场编程机器人的控制系统ppt课件.pptx

小新****ou


1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人现场编程机器人的控制系统ppt课件.pptx
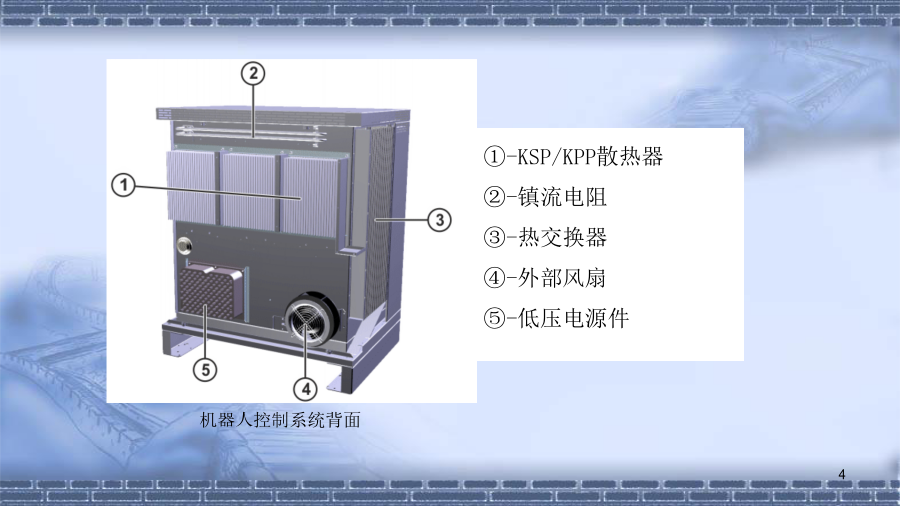
机器人的控制系统学习目标和建议控制系统由哪几部分组成?机器人控制系统背面控制系统的属性有哪几个方面

工业机器人现场编程运动模式操纵ppt课件.pptx
第四章工业机器人现场编程一、运动模式的概述常规操作快捷菜单操作快捷按钮操作操纵杆的使用技巧单轴运动的手动操纵单轴运动的手动操纵线性运动的手动操纵线性运动的手动操纵重定位运动的手动操纵重定位运动的手动操纵四、总结

工业机器人现场编程-循环技术编程-课件.pptx
循环技术编程学习目标和建议任务描述编写程序xieduoMAIN的操作步骤3)为程序声明一个整型变量count,在程序初始化INI行上方输入“declintcount”(字母不分大小写)。4)在INI与END行之间,利用编辑器,添加for循环行与endfor结束循环行。5)利用编辑器,在for循环行为count赋值并制定步幅,即“forcount=1to6step1”,如左图所示。6)在for循环之间嵌入SWITCH–CASE分支循环,以使变量count为不同值时,执行不同的程序段,如下右图所示。7)在整型

工业机器人现场编程-机器人上的负载-课件.pptx
机器人上的负载主要内容工具负载数据工具负载数据的影响输入的负载数据会影响许多控制过程,包括:控制算法(计算加速度)、速度和加速度监控、力矩监控、碰撞监控、能量监控等等,所以正确输入负载数据是非常重要的。当然,如果机器人以正确输入的负载数据执行其运动,则可以从它的高精度中收益,使运动过程具有最佳的节拍时间,最终使机器人达到长的使用寿命。输入负载数据的操作步骤1)选择主菜单,依次选择“投入运行”、“测量”、“工具”、“工具负载数据”;2)在工具编号栏中输入工具的编号,用“继续键”确认;3)输入负载数据:M栏:

工业机器人现场编程示教器使用ppt课件.pptx
第四章工业机器人现场编程一、认识示教器ABBIRC5示教器正面示教器外观及布局如何手持示教器如何设置示教器的显示语言如何设定机器人系统的时间如何查看常用信息与事件日志如何使用示教器的使能器三、总结