
一种能够实现正常步态型的康复训练机器人.pdf

Ja****23


1/9

2/9
3/9

4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种能够实现正常步态型的康复训练机器人.pdf
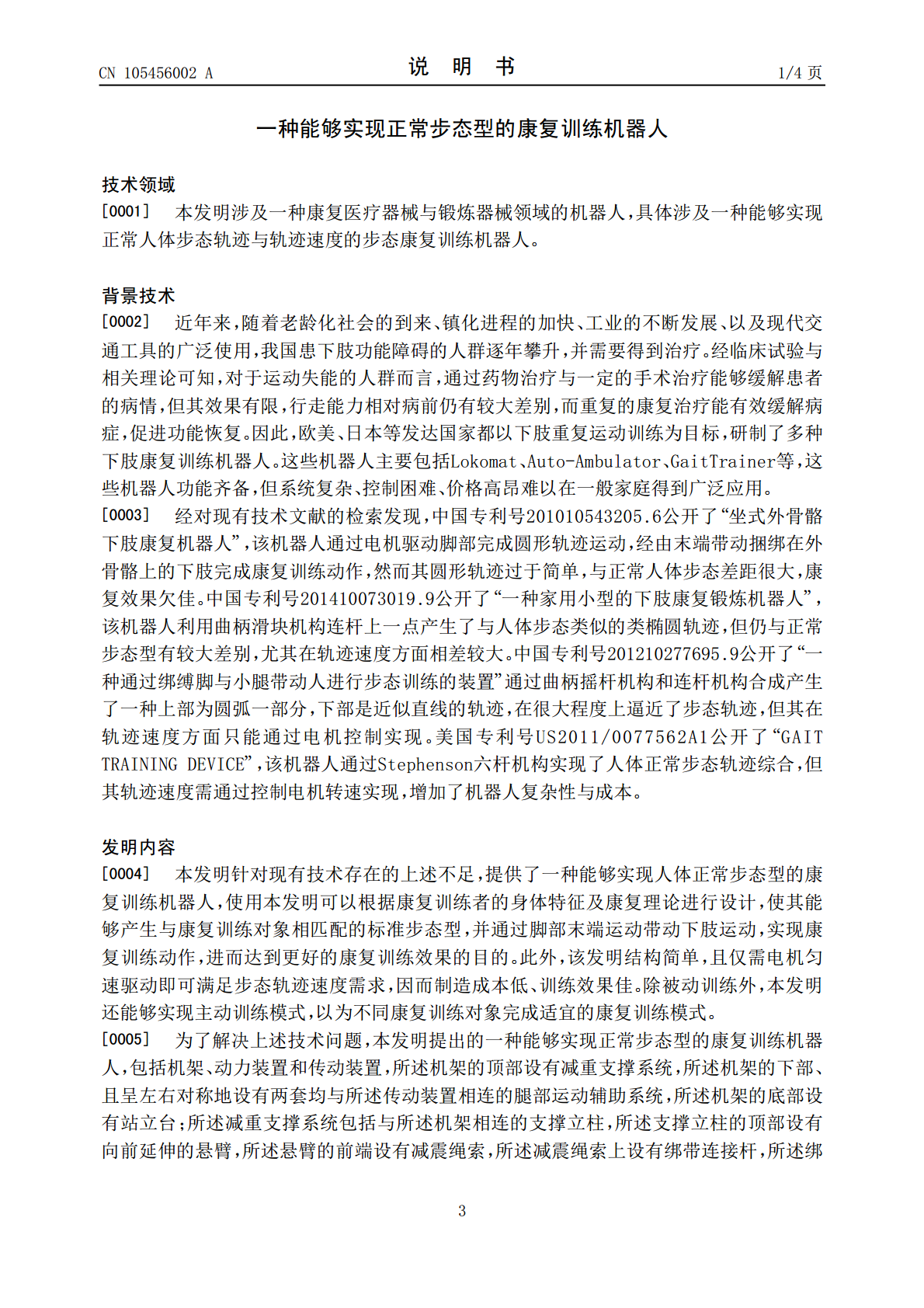
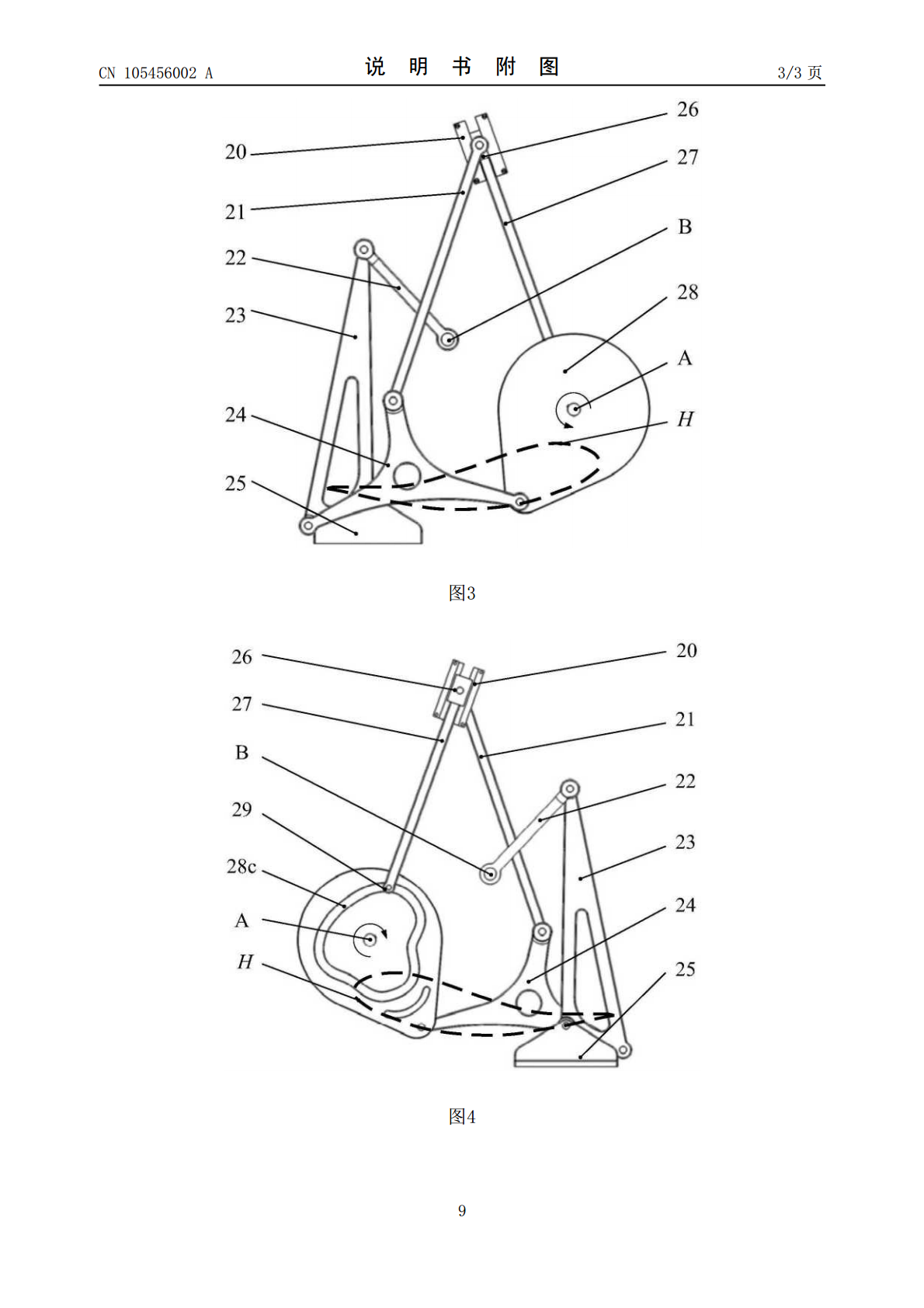
本发明公开了一种能够实现正常步态型的康复训练机器人,包括:减重支撑系统,左腿运动辅助系统与右腿运动辅助系统。左、右腿运动辅助系统分别于减重支撑系统左右侧相连,减重支撑系统通过绑带等部件与人体上半身相连,对康复训练对象进行部分减重。使用者脚部与运动辅助系统踏板相连,通过踏板引导脚部运动进而带动下肢运动完成康复训练动作。本发明的运动辅助系统包括一个由凸轮机构与七杆机构组合的复合机构,能够精确产生人体正常步态轨迹,且电机只需匀速驱动即可产生正常人体步态轨迹速度,满足了位置与速度要求,解决了现有设计轨迹速度实现困

可实现正常步态轨迹的四肢联动康复训练机器人.pdf
本发明公开了一种能实现正常步态轨迹的四肢联动康复训练机器人,包括机架、动力装置、传动系统和两个脚踏板;传动系统由主动链轮、链条、从动链轮和传动轴组成;机架的左右两侧对称地分布有结构相同的两套运动辅助系统,每套运动辅助系统是由凸轮机构和四杆机构连接组成的凸轮‑连杆机构;两套运动辅助系统的末端分别连接至两个脚踏板;连杆上的一点C与脚踏板铰接;凸轮机构用于控制曲柄的长度;两套运动辅助系统中的曲柄以180°的相位差安装。本发明能够产生精确地步态轨迹,解决一般步态康复机构轨迹与正常步态轨迹偏差较大的问题。既可以选择

一种步态康复训练机器人.pdf
本申请公开了一种步态康复训练机器人,包括:支撑架;设置在支撑架上的滑块连杆机构,滑块连杆机构能与人体连接;设置在支撑架上,并驱动滑块连杆机构运动的驱动装置;控制驱动装置的控制器。上述结构中,带动人体的大腿或小腿等单一关节运动的结构仅包括滑块连杆机构和驱动装置,与现有的多个驱动部件和多个传动部件的外骨骼相比,结构更加简单,使人机适应性和运动柔顺性均得到了提高,并且简单的结构也能够进一步提高结构与人体关节的对中性,避免了关节对准误差,同时将滑块连杆机构和驱动装置设置在支撑架上,而不再穿戴在患者身上,也能够减轻

一种仿正常人体步态轨迹的下肢康复训练的组合装置.pdf
本专利提供一种仿正常人体步态轨迹的下肢康复训练组合装置,该装置由底座、凸轮1、凸轮2、踏板、滚轮1、滚轮2、推杆1、推杆2、固定支架1和2构成,固定支架1和2焊接在由外部驱动力作用下作水平往复运动的底座上,凸轮1与凸轮2在外部驱动力驱动下分别与固定支架1和2作转动连接,凸轮1与凸轮2分别通过滚轮1、滚轮2推动推杆1、推杆2,本专利的特征在于:踏板前端与推杆1上端铰链连接,其后端的导轨槽孔与推杆2上端的导杆作滚动连接并且踏板随着在具有规定型线的凸轮1与凸轮2驱动下的上下往复运动以及底座的水平往复运动而运动。
一种步态康复训练装置.pdf
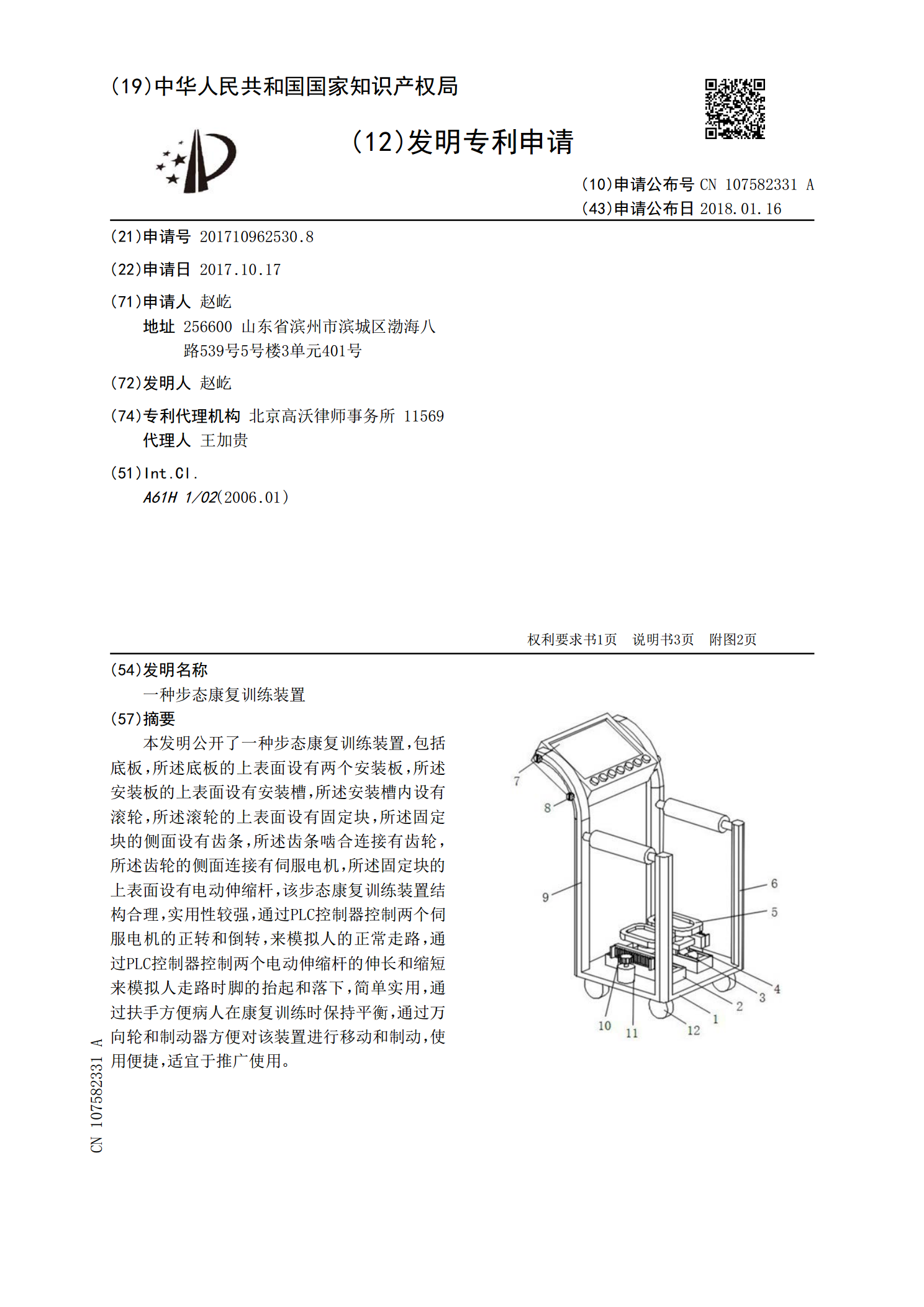
本发明公开了一种步态康复训练装置,包括底板,所述底板的上表面设有两个安装板,所述安装板的上表面设有安装槽,所述安装槽内设有滚轮,所述滚轮的上表面设有固定块,所述固定块的侧面设有齿条,所述齿条啮合连接有齿轮,所述齿轮的侧面连接有伺服电机,所述固定块的上表面设有电动伸缩杆,该步态康复训练装置结构合理,实用性较强,通过PLC控制器控制两个伺服电机的正转和倒转,来模拟人的正常走路,通过PLC控制器控制两个电动伸缩杆的伸长和缩短来模拟人走路时脚的抬起和落下,简单实用,通过扶手方便病人在康复训练时保持平衡,通过万向轮