
水陆两栖蛇形机器人的环境适应运动控制方法研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水陆两栖蛇形机器人的环境适应运动控制方法研究的综述报告.docx
水陆两栖蛇形机器人的环境适应运动控制方法研究的综述报告水陆两栖蛇形机器人是一种能够在水中、陆地和潜水等多种环境中进行运动和掌握信息的机器人。它的外形与蛇非常相似,可以通过身体弯曲进行运动,不仅具有良好的移动性能,也具有很强的灵活性和适应性。但是,要使水陆两栖蛇形机器人具有较好的环境适应性和运动控制能力,需要采用一系列的方法和技术。本文会综述水陆两栖蛇形机器人的环境适应运动控制方法。一、各种运动控制方法1.基于模型预测控制方法基于模型预测控制方法是一种目前比较流行的运动控制方法,在水陆两栖蛇形机器人的运动控

水陆两栖蛇形机器人的环境适应运动控制方法研究.docx
水陆两栖蛇形机器人的环境适应运动控制方法研究引言:水陆两栖蛇形机器人正因其独特的形态和优秀的适应性在生物领域和机器人领域引起广泛关注。与传统的机器人相比,两栖蛇形机器人可以通过改变身体的形态来适应特定的工作环境。然而,由于其机械结构较为复杂,同时需要兼顾水中行动和陆地运动,因此两栖蛇形机器人的运动控制方法一直是研究的重点问题。本文将从两栖蛇形机器人的环境适应性和运动控制两个方面出发,介绍目前研究的主要进展和应用前景。一、两栖蛇形机器人的环境适应性研究1.基于形状变化的适应性控制两栖蛇形机器人可以通过改变身

水陆两栖蛇形机器人的环境适应运动控制方法研究的任务书.docx
水陆两栖蛇形机器人的环境适应运动控制方法研究的任务书任务书项目名称:水陆两栖蛇形机器人的环境适应运动控制方法研究项目负责人:xxx项目起止时间:xxxx年xx月--xxxx年xx月项目背景在工程和科研领域,机器人已经成为重要的工具和研究对象。水陆两栖蛇形机器人是一种结构特殊、具有多种运动能力的机器人,可在水下、水面和陆地进行多种任务,因此被广泛应用于搜索救援、海洋探测、科学探索等领域。但是,该机器人在不同的环境下面临着挑战,因此研究其运动控制方法,使之能够适应各种环境,成为了一个急需解决的问题。项目目标本
水陆两栖的轮桨蛇形机器人及其运动方法.pdf
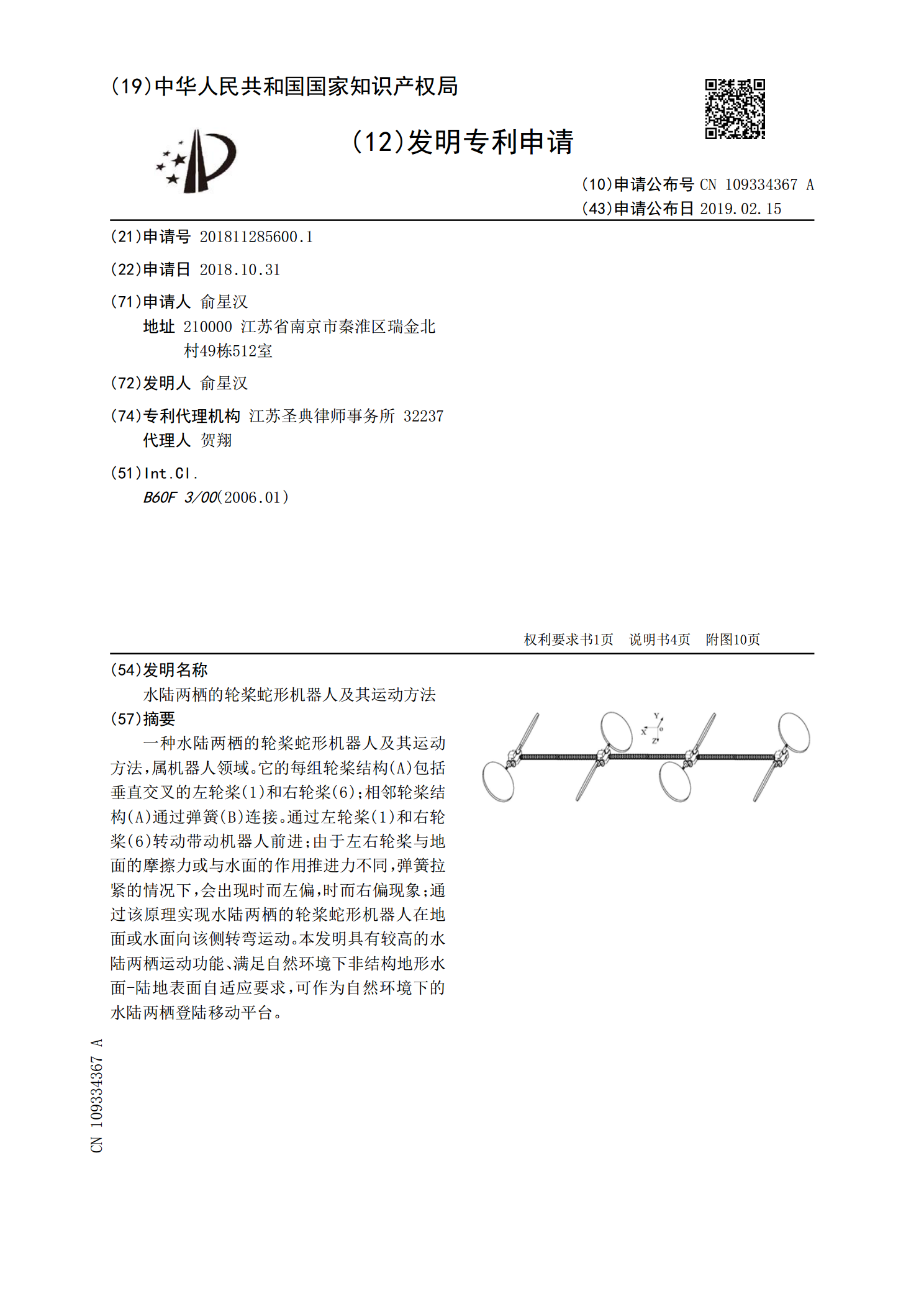
一种水陆两栖的轮桨蛇形机器人及其运动方法,属机器人领域。它的每组轮桨结构(A)包括垂直交叉的左轮桨(1)和右轮桨(6);相邻轮桨结构(A)通过弹簧(B)连接。通过左轮桨(1)和右轮桨(6)转动带动机器人前进;由于左右轮桨与地面的摩擦力或与水面的作用推进力不同,弹簧拉紧的情况下,会出现时而左偏,时而右偏现象;通过该原理实现水陆两栖的轮桨蛇形机器人在地面或水面向该侧转弯运动。本发明具有较高的水陆两栖运动功能、满足自然环境下非结构地形水面‑陆地表面自适应要求,可作为自然环境下的水陆两栖登陆移动平台。

蛇形机器人的运动控制研究.docx
蛇形机器人的运动控制研究摘要:蛇形机器人是一种新型移动机器人,具有良好的适应性和灵活性。在蛇形机器人的运动控制方面,存在着许多挑战和难点。本文综合分析了蛇形机器人的构造和运动方式,研究了蛇形机器人的运动控制方法,并结合实例介绍了其中几种常用的方法。关键词:蛇形机器人;运动控制;构造;方法一、引言随着现代技术的不断发展,移动机器人已成为人们关注的焦点。蛇形机器人是一种新型移动机器人,由多个连续的节和伸缩杆连接而成,具有良好的适应性和灵活性。因此,蛇形机器人在工业生产、医疗救护和资源勘探等领域得到了广泛的应用